
|
|
|
Главная -> Повышение запаса устойчивости 96 Непрерывные линейные системы автоматического управления Таблица 5.2. Правила преобразования структурных и линейных систем Операция Исходная схема Эквивалентная схема Перестановка сумматоров или элсм(!нтов сравнения X5X-X2X3+Xi Перестановка звеньев Перенос узла с выхода на вход сумматора 3 i Х2 Перенос узла с входа па выход сумматора Перенос узла с выхода на вход звена Перенос узла с входа на выход звена Перенос сумматора с выхода на вход звена <Э-- W, Перенос сумматора с входа на выход звена ®-Н Замена звеньев прямой и обратной цепей Переход к единичной обратной связи  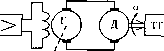 Рис. 5.9 значительно выше и обеспечивается установкой двигателя Л соответствующей но-.чипшльпо!! моицюсти. В этом, а также в дистанционности управления .заключается смысл использования иодобпой следящей систе.мы воспроизведения угла поворота. Сравнегшс углов поворота командной и исиолнительпой осей осуществляется при П0.М0П1И двух потеицио.метров П, и IL. 11сли углы поворота ко.мандпой н испол-питсльнойосе!! ие равны д, ф то возникает напряжение рассогласования м, кото-рос поступает иа вход первого элекг])опного усилителя. Далее усиленный сигнал после прохождения через два электронных усилителя подводится к обмотке возбуж-деги1я генератора ОВГ, привод которого не показан па схеме. Якорь генератора Г соединен с якорем двигателя Д, обмотка которого (ОВД) подключена к постоянно-.му иапряжепию. В результате п])н появлеппи рассогласо!5а1п1Я в = О, - 2 двигатель начинает вращаться в сторону уменьшения ошибки до согласования двух осей, ,3а-да1С)пи1М воздействием здесь является угол поворота в,(. В качестве во.змущаюпю-го во.здействия рассмотрим .момент нагрузки М(0 па осп управляемого объекта. Для улучн!сния динамических качеств сле;1ЯП1ей систе.мы в ней предусмотрепа отрицательная обратная связь по напряжению тахогенсрагора (ТГ). Будем считать, что все звенья системы JiHiieiinbi, за исключением электромашип-ного усилителя (генератора), у которого электродвижущая сила е связана с током возбуждения i,j нелинейной кривой иамагничивашгя генератора. Однако и здесь и])п сравнительно небольших напряжениях якоря (примерно до половины по.минальпо-го) можно завнси.мость между е и считать также линейной. Таким образом, в рассматриваемой системе отпадает необходимость линеаризации и можно сразу приступить к составлению уравпепий. Для этой це;п! разобьем систему па дтш.мические звенья и найде.м их передаточные функции. Чувствительный элемент. Напряжение па выходе первого потепцио.метра будет = и на выходе второго и- = кЬ, где к, [ В/рад J - крутизна, или коэффициент передачи потенциометра. Напряжение па выходе чувствительного элемента равно разности u = u,-U2k, (di - 2) = кЬ. Это дает передаточную функнию чувствительного элемента W,(p) = к, . (5..3/0 (5.35) 98 Непрерывные линейные системы автоматического управления Электронные усилители. Считая усилители безыиерциоииыми, можнозанисать их передаточные функции в виде Щ(Р) = -2. (5.36) W,(p)=k (5.37) где 2 и 3 ~ коэффицие}1ТЫ усиления по иапряжеттю первого и второго усилителей. Обмотка возбуждения генератора. Дифференциальное уравнение можно записать на основе второго закона Кирхгофа: 4 + вв= вых. (5.38) где rjj и - суммарные сопротивление и индуктивность цепи возбуждения с учето.м выходного каскада усилителя. Приведем это уравнение к стандартному виду: (вР + 1)гв= = 4 вш. (5.39) где = ij /Г[з - постоянная вре.мени цепи возбуждения. Отсюда находим передаточную функцию обмотки возбуждения: .(P) = J. (5.40) Генератор. Для прямолинейной части характеристики намагничивания можно положить e-ki , (5.41) где kr - коэффициент пропорциопальности .между э. д. с. генератора и током возбуждения в линейной части характеристики. Отсюда получаем передаточную функцию генератора: W,(p)-k,. (5.42) Двигатель. Так как при фиксированном во;!буждепии двигатель имеет две степени свободы, то необходн.мо иметь для него два исходных дифференциальных уравнения. Первое уравнение может быть получено, если записать второй закон Кирхгофа для цепи якоря: L, + rл+C,Фn = e. (5.43) Второе уравнение представляет собой .закон равновесия моментов на валу двигателя: C:fi\-M = J. (5.44)
|
||||||||||||||||||