
|
|
|
Главная -> Повышение запаса устойчивости и передаточная функция но оншбке Ф,(р) = 1-Ф(р) = i + W(p)W2{pУ (.90) Эти функции могут быть иснользовапы обычным образом, как это делается для систем с постоя1ИН>1.ми пара.метрами при исследовании устойчивости, точности и качества управления, но исследоваггие должно охватить весь рабочий интервал б от О до Т. Как и в случае замороженных ко:-к])фициеитов, здесь приходится намечать оиас-ные точки, где должно быть проведено исследование. Однако в расс.матриваемо.м методе можно учитывать при этом пе только сами значения коэффициентов в отдельные моменты времени, iro и характер их изменения во времени (скорость изменения, ускорение измогения и т. д.). Это делает все исследование более полным нрн сохранении его относительной простоты. В некоторых случаях оказывается более целесообразны.м отыскание п 1Н)следу-ющее замораживание переходной функции звена с переменными параметра.ми Н2(1-Ь,%)-к.2(х,%). (13.91) Для переходной функции (13.18) может быть найдена передаточная функция Щ(рА))Р lh2(x,%)e-PdT. (13.92) Но сравнений с нахождением передаточной функции по замороженной весовой функции (13.87) здесь получается обычно более полный учет динамических качеств звена с переменными параметрами. Это оказывается наиболее заметным в тех случаях, когда в правой части диффереп пиал ьпого уравнения звена имеются перемснпыс во времени коэффрптентъг Их изменепие может быть учтено только при нахождении переходной функции, так как при нахождении весовой функции значегтя козф-фициентов в правой части уравнения фиксируются в люмеит приложения единичного импульса. РАЗДЕЛ III ЛИНЕЙНЫЕ ДИСКРЕТНЫЕ СИС Глава 14 ИМПУЛЬСНЫЕ СИСТЕМЫ § 14.1. Общие сведения Линейной импульсной системой называется такая система автоматического управлепия, которая кроме звеньев, описываемых линейными дифференциальными уравнениями, солвржнт импульсный элемент, преобразующий непрерывное входное воздействие в последовательность импульсов (рис, 14.1, а). Примеры и.мпульсиых систе.м рассмотрены в главе 1. В общем случае можно изобразить обобщенную структурную схему импульсной системы так, как показа1Го па рис. 14.1, б, где все непрерывные звенья сведены в один блок - непрерывную часть системы 114, Последняя может иметь какую угодно структуру (любой сложности, с обратными связями и т. п.). Импульсный элемент может представлять собой самостоятельное функциональное устройство (см., например, рис. 1.25) или являться составной частью 1Н1фро-ана-логовых преобразователей, входящих в систему управления с цифровыми управляю-пшми машинами (ЦВМ). Более подробно систе.\тьг с ЦВМ будут рассмотрены шгже. В процессе преобразования непрерывного сигнала в дискретный и.чтульсиый эле-.меит (рис. 14.1, а) выполняет две оггерацип; квантование по вре.мени и импульс1Гую модуляцию. Первая из них состоит в тем, что сигнал u*(t) появляется в дискретные мометъ! времени t = t,(i = 0,1,2,...). Чаще всего эти .моменты времени равноотстоящие, т. е. tj = iT, где Т- период дискретности. В результате импульсной модуляции из.меняется какой-либо параметр и.мпульса (амплитуда, ширина). Фор.ма импульсов может быть любой (пря.моугольной, трапецеидалыюй и т.п.), но обычно используются импульсы прямоугольной формы. 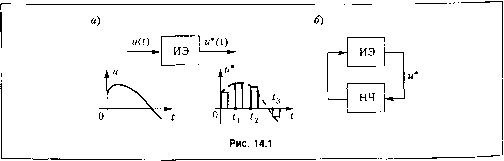 Наиболее распространеппы.ми в настоящее время видами импульсной модуляции являются амп-литудно-имну.Ц)Сная (АИМ) и н1иротио-им11ульс-ная(ШИМ). При амплитудно-импульсной .модуляции .модулируем ы.м параметром служит амплитуда (высота) импульсов. Обычно она пропорциоиальназначени-ям непрерывного сигнала г/(г:) в дискретные мо.менты времени t = iT{i = 0,1, 2,...), т. е. значениям M(/0 = M(OUr/-. (14.1) Сигна-т u*{t) па выходе и.vпyльcIIOгo элемента формируется в виде (рис. 14.2) и*([) = 1*л (ГО при iT<t<ii + y)T, О ири 0 + у)Т t<(i + ).)T, (14.2) 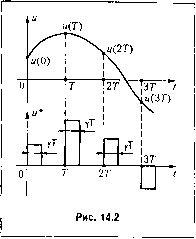 где - коэффициент пропорциона.1ЬНОсти; у - скважность и.мпульсов (О < у < 1), которая остается постоянной. При щиротно-импульсной модуляции модулируем ы.м нара,метром является ширина или длительность импульсов т,- = У/Т, где у, = уОЛ - скважное гь /-го илщульса. Ам]1;1игуда и.мпульсов при этом остается постояшюй. Сщ-цал па выходе имиупсиого элемента (широтио-импульсиого модулятора) фopн lpyeтcя в виде (рис. 14.3) \ О при (/ + у,)<г<(г + 1)7\ 1де h - амплитуда и.мпульсов, а sign r/(/7) означает знак величины u(iT). (14.3) 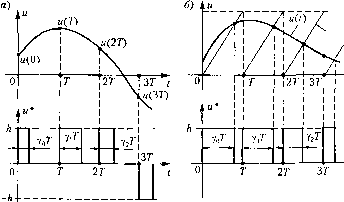
|