
|
|
|
Главная -> Повышение запаса устойчивости 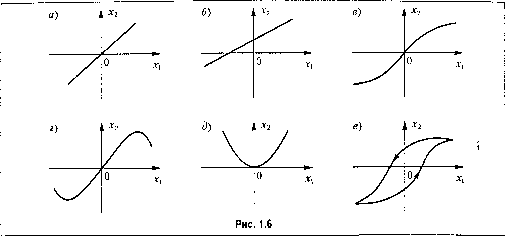 преобразования сигнала в да1И1ом звене описывается некоторым уравнением (или экспериментально снятой характеристикой), связывающим выходную переменную х2 с входной перемеииой .Tj. Совокупность уравнений и характеристик всех звеньев описывает динамику процессов управления во всей системе в целом. Существуют ра.зличные характеристики звеньев: статические, переходные, частотные и др. Далее все они будут изучены. Основными признаками деления автоматических систем па больнше классы по характеру внутренних дина.мических процессов являются следующие: непрерывность или дискретность (прерывистость) дина.мических процессов во времени; линейность или нелинейность уравнений, описывающих динамику процессов управления. По первому признаку автоматические системы делятся на системы непрерывного действия, системы дискретного действия (импульсные и цифровые) и системы релейного действия. По второму признаку каждый из указанных классов, кроме релейного, делится на системы линейные и нелинейные. Системы же релейного действия относятся целиком к категории нелинейных систем. Дади.м определение каждого класса автоматических систем, а затем рассмотрим их примеры. Системой непрерывного действия или непрерывной системой называется такая система, в каждом из звеньев которой непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины. При это.м закон изменения выходной величины во времени может быть произвольным, в зави-си.мости от фор.мы изменения входной величины и от вида уравнения динамики (или характеристики) звена. Чтобы автоматическая систе.ма в целом была непрерывной, необходимо прежде всего, чтобы статические характеристики всех звеньев системы были непрерывными. При.меры непрерывных статических характеристик показаны на рис. 1.6. 41111 Рис. 1.7 Системой дискретного действия, или дис-KpcTHoii системой называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина изменяется ис непрерывно, а имеет вид отдельных импульсов, появляющихся через некоторые промежутки времени (рис. 1.7). Звено, преобразующее непрерывный входной сигнал в последовательность импульсов, называется импульсным элементом или импульсным модулятором. Если последующее звено системы тоже дискретное, то для него не только выходная, по и входная величина будет дискретной (импульсной). К дискретным автоматическим системам относятся импульсные системы (т. е. системы с импульсным элементом), а также системы с цифровыми вычислительными устройства.мн. Системой релейного действия или релейной системой называется такая система, п которой хотя бы в одном звене при непрерывном измспсиии входной величины выходная величина в некоторых точках процесса, зависящих от значения входной величины, из.мепяется скачком. Такое звено называется релейным звеном. Статическая характеристика релейного звена имеет точки разрыва, как показано в разных вариантах па рис. 1.8. Обратимся теперь ко второму признаку классификации авто.матических систем. Линейной системой называется такая система, поведение всех звеньев которой вполне описывается линейными уравнениями (алгебраическими и дифференциаль-ны.ми или разностны.ми). Для этого нсобходи.мо прежде всего, чтобы статические характеристики всех звеньев системы были линейными, т. е. имели вид прямой линии (рис. 1.6, а и б). 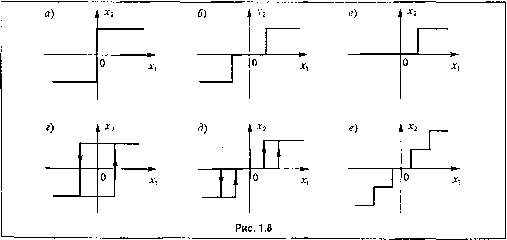 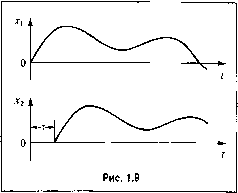 Ес.ти динамика всех звеньев системы описывается обыкновенными линейными дифферсппиальпыми (и линейными алгебраическими) уравнениями с постоянными коэффициентами, то систему называют обыкновенной линейной системой. Если в уравнении динамики какого-либо звена линейной системы имеется хотя бы один или несколько ие1)еме1П1ЫХ во времени коэффициентов, то получается линем-7ШЯ система с переменными параметрами. Если какое-либо звено описывается линейным уравнением в частных производных (например, имеют место волновые процессы в трубопроводе или в электрической линии), то система буяет линейной системой с распределенными параметрами. В отличие от этого обыкновенная линейная система является системой с сосредоточенными параметрами. Если дгтамика какого-либо звена системы описывается линейным уравнением с запаздывающим аргументом (т. е. звено обладает чисто временным запаздыванием или временной задержкой т передачи сигнала (рис. 1.9)), то систе.ма называется .чинейной системой с запаздыванием. Динамика линейных импульсных систем описывается линейными разностпы.ми уравнениями. Нелинейной системой называется такая система, в которой хотя бы в одно.м звене нарупается линейность статической характеристики или же имеет место любое другое иарущепие линейности уравнений динамики звена (произведение псре.мен-пых или их производных, корень, квадрат или более высокая степень перемеииой, любая другая нелинейная связь переменных и их производных). Следовательно, к нелинейным системам относятся, в частности, все системы, в звеньях которых имеются статические характеристики любого из многих видов, показанных па рис. 1.6, в-е. К ним же относятся и все релейные характеристики (рис. 1.8). Нелинейными могут быть, разумеется, также и системы с переменными параметрами, с распределенными параметрами, с запаздыванием, импульсные и цифровые системы, если в них где-либо нарушается линейность уравнений динамики. При исследовании, расчете и синтезе автоматических систем нужно иметь в виду, что наиболее полно разработаны теория и различные прикладные методы для обыкновенных линейных и линейных дискретных систем. Поэтому в интересах простоты расчета всегда желательно (там, где это допустимо) сводить задачу к такой фор.ме, чтобы максималыю использовать методы исследования таких систем. Обычно уравнения динамики всех звеньев системы стараются привести к обыкновенным линейным, и только для некоторых звеньев. Особое линейное звено Обыкновенная линейная часть Нелинейное звено Ли11еЙ1гая часть
|