
|
|
|
Главная -> Повышение запаса устойчивости где это недопустимо или где специально вводится особое линейное или нелинейное звено, учитываются эти особые их свойства. Тогда при наличии одного такого звена система при расчете разбивается на два блока (рис. 1.10), в одно.м из которых объединяется весь комплекс обыкновенных лииейших звеньев. Однако это вовсе не значит, что при проектировании новых автоматических систем нужно стремиться к обыкновенны.м линейны.м системам. Наоборот, уже из приведенных выше определений совершенно очевидно, что обыкновенные линейные системы обладают ограниченными возможностя.ми. Введение особых линейных и нелинейных звеньев .может придать системе лучшие качества. Особенно богатыми возможностями обладают системы со специально вводи.мыми нелинейностями и дискретные системы, в то.м числе с цифровыми вычислительными устройствами, а также адаптивные систе.мы. § 1.3. Примеры непрерывных автоматических систем Одна из первых в истории техники автоматических систе.м была изобретена И. И. Ползуновым в 1765 г. Это был автоматический регулятор уровня воды в котле его паровой .машины (рис. 1.11). Измерительное устройство (поплавок), измеряющее управляемую величину (высоту уровня воды в котле), непосредственно перемещает управляющий орган (клапан питания котла водой). Котел является управляемым объектом. Изменение величины отбора пара из котла в паровую машину является основ-ны.м возмущающим воздействием на объект. Если отбор пара увеличится, испарение воды ускорится, уровень воды II начнет уменьшаться. Тогда поплавок, опускаясь, будет шире открывать клапан, уси;п1тся приток питающей воды, и уровень ее будет автоматически восстанавливаться. Кроме изменения отбора пара, возмущающее воздействие па объект будет проявляться также и в изменении условий теплового режима работы котла (интенсивность топки, температура питаюпюй воды и окружающего пространства). Регулятор во всех случаях будет действовать так, чтобы ликвидировать нежелательное отклонение уровня воды, по каким бы- причина.м оно ГШ возникало. Следующим в истории техники ав-томатически.м регулятором, нолучив-ПП-1М широкое распространение, был центробежный регулятор скорости вращения вала паровой машины, изобретенный Уаттом в 1784 г. (рис. 1.12). Этот регулятор имеет другую конструкцию и другую природу управляемой величины (угловая скорость со), но совершенно тот же общий нринции действия. Измерительное устройство (центробежный механизм) реагирует на из- Отбор пара (возмущающее воздействие) Питание водой Измерительное стройство 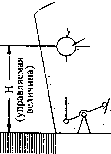 Управляющий орган Топка  Hai-рузка на валу , Паровая машина (управляемый объект) 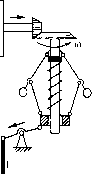 Центробежный механизм Управляющий орган ~ Питание машины паром Рис. 1.12 .мепение управ.тяемон величины со. Так, если угловая скорость вала со увеличивается, шары центробеж110го механи.з.ма расходятся, .муфта подн11мается и перемеи1ает непосредственно уиравляюп1ИЙ орган (например, засло11ку втрубе питания машины паром). Это изменяет приток энергии в маншпу, чем авто-.матически уничтожается нежелательное отклонение угловой скорости (О. Основным воз.муп1аюпи1М во.здействием па объект здесь является HS.Meneiuie нагрузки иа валу паровой маптииы. Кроме этого, может иметь место и другое воз.мушаюшее воздействие в виде иарунгения нормальных параметров пара в трубе питания машины. Регулятор гасит влияние любого воздействия (в определе1И1ЫХ пределах), стремясь все время ликвидировать отклонение, по какой бы причине оно ни возникало. Для иллюстрации общности принципов построения систем авто.матического управления относящихся к самы.м разнообразным техническим объекта.м, приведем еще несколько конкрет11Ых примеров. На рис. 1.13 изображена схе.ма автоматической стабилизации температуры воды или масла в тепловом двигателе. Нагретая вода из двигателя (управляемый объект) поступает в терлюстат (измерительное устройство). Если температура воды повышается, то иод действием увеличения давления паров специальной легко испаряю-И1ейся жидкости, находящейся в сильфоне тер.мостата, прикрывается клапан прямого возврата воды в двигатель. Вследствие этого больпюе количество воды пойдет в обход - через радиатор, где она охлаждается. Таким образо.м, автоматически под- 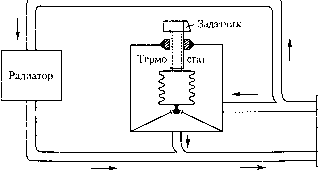 Тепловой двигатель (уиравляе-,мый объект) 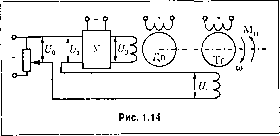 держивается постоянная температура воды в системе охлаждения теплового двигателя (в частности, авто-мобилы10го). На рис. 1.14 пока,эа11а схема системы стабилизации угловой скорости ш вращения вала электрическо1о двигателя Дв. Последний является управляемым объектом. Измерительным устройством яв;1яется тахо-геператор Тг, вырабатывающий напряжение (/ пропорциональное управляемой величине ш. На нотсшию.метре задающего устройства устанав.чивается напряжение L\f, соответствующее т1)ебуемому значению угловой скорости ш. Рассогласование 11-2 = Uq - [/, подается Н а усилитель У. Поступающее с его выхода в обмотку управления двигателя напряжение U- является управляющим во.здействием, благодаря которому двигатель лтсвидирует создавшееся отклонение ш. Изменение создаваемого нагрузко!! мо.мента М представляет собой воз.мущающее воздействие. Примерами связа1НИ)1х систем являются системы стабилизации напряжения и частоты переменного тока, стаби.тизации скорости и температуры в реактивных двигателях, стабилизации различных величин в энергетической систе.ме, состоящей из нескольких параллельно работающих объектов. Связанная система управления получается и при рассмотрении работы всего автопилота на самолете в целом. Пример элсктро.механичсской следящей системы показан на рис. 1.15. Принцип ее действия следующий. На входе вращением командной оси КО извне задается произвольный закон изменения угла поворота во времени: б, = Тот же самый закон должен быть автоматически воспроизведен на управляемом объекте УО, ось которого является иснол-пите;1ьной осью ИО. Сравнение углов поворота ко.мандиой и исполнительной осей осуществляется датч1И<:о.м угла рассогласования, состоян1ИМ из потенциометров П, и П2 (чаще вместо потенциометров используются синусно-косимусныс вращающиеся трансформаторы СКВТ или сельсины). Если углы поворота различны, то возникает рассогласоватте, ii;ni ошибка б = тЭ, - 62, а па выходе датчика появ.чяется па-пряжение, пропорциональное этой ошибке: [/, = Усиленный усилителем У сигнал U2 поступает на обмотку управления двигателя ]\в, который начинает врап1аться, поворачивая через редуктор Р исполнительную ось в сторону у.меньшения ошибки. Подобная следяпщя система позволяет при незначительной мопню-сти, требуемой для вращения командной оси, управлять момптыми или тяжелыми объектами (орудийными баптя.ми, антеннами радиолокаторов и т. п,). Кроме того, она может обеспечить дистанцио1П[ость управления, т. е. командная ось может находиться на пекоторо.м удалении от объекта и
|