
|
|
|
Главная -> Повышение запаса устойчивости силовой части систе.мы. Если же вместо проводной связи используются радиолинии, то удале1П1е может быть значительным, что позволяет, например, управлять с Земли подвижными объектами, находяпи1МИся па Луне. Следует учитывать, что полностью ликвидировать опп1бку следящая система, как и любая другая автоматическая систе.ма, не .может. Во-иервых, это обусловлено наличием трения в осях, зоиа.ми нечувствительности и т. п., из-за чего двигатель останавливается при несколько отличающемся от нуля напряжении Тогда и напряжение должно отличаться от нуля. Но так как C/j = кф, то должна существовать ошибка Ь = называе.мая инструментальной ошибкой. Во-вторых, если со стороны объекта к двигателю через 1)едуктор прикладывается момент нагрузки М (возмущающее во.здейсгвие), то для его комиеисацпи сам двигатель должен создать момент противоположного знака. Для этого к его об.мотке управления должно быть приложено напряжение U2, пропорциональное М , для чего опять-таки должна появляться ои1ибка 0 называемая мо.мептпой ошибкой. В результате, если пове[)нуть командную ось па некоторый угол О, = Ь, то исполнительная ось повернется иа угол 2 = - б - в . В-третьих, если ко.маидная ось вращается с постоянной угловой скоростью Q то очевидно н исполнительная ось после завернгепия переходных процессов должна вращаться с той же скоростью; 0-2 = Но чтобы исполнительная ось вращалась, к двигателю должно быть приложено напряжение U2, пропорциональное угловой скорости. А это воз.можно только при наличии так называемой скоростной опдибки Ь, величина которой пропорционатьиа Полная установившаяся ошибка в этом случае бу = + б + б . Наличие .момептной и скоростной опитбок обусловлено самим ириицино.м действия замкнутой системы, которая реагирует ие па задаюп1ее и возмупшюпик воздействия, а па отклонешю управляемой величины от ее требуемого значения. Более детально ошибки систе.м рассматриваются в разделе П. Кро.ме электро.мехаиических следяпщх систем, существуют также электрогидравлические, электропневматические и чисто гидравлические или нпев.матические следяпиге системы в зависимости от вида применяе.мых в них усилительных и ис-иолиительпых устройств. 0бп1ий припцпп действия во всех случаях остается тем же самым. Входная и выходная величины следя 1цей системы мо1ут быть не только мехапп-ческне, как в при.мере иа рис. 1.15; они .могут и.меть ;[юбую физическую ирирод}. В соответствии с эти.м конструкции тоже могут быть весьма разнообразными. На рис. 1.16 изображена схема следяп;ей системы, входной величиной у которой является иапряжеппе Uq, а выходной - W. Принцип действия и основные элементы у нее такие же, как и у системы стабилизации скорости вращения (рис. 1.14), только напряжение C/q подается извне и .может изменяться. Если па выходе дополнительно поставить понижающий редуктор Р и датчик угла ДУ, то получится так называемый ии-
Задатчик f Управляемый объект Шторки Охлаждающий Нг воздух Lr. 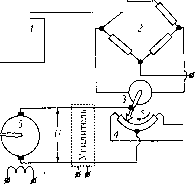 -0 - Рис. 1.17 тег1)иру10щий привод, у которого напряжение на выходе U. практически пропорционально интегралу от 6q. Действительно, угловая скорость со из.мепяется пропорционально напряжению Uq, сама она представляет собой производную от угла поворота, а угол ~- интеграл от угловой ско-[)ости. Датчик угла измеряет угол поворота и выдает пропорциональное ему напряжение. Высокая точность интегрирования достигается за счет применения .малоииерциоиных электрических двигателей со встрое1ПП>1\и1 в их корпуса тахогеператорами. В настояп1ее время \ю многих областях техники существует необозримое количество самых разнообразных систем автоматического управления, использующих принцип следящих смсггем. Он при.мепяется почти везде, где нужно добиться высокой точности и надежности автоматического управления. §1.4. Примеры дискретных и релейных автоматических систем Чтобы наглядно представить себе нрипщт работы простейп1ей импульсной системы, покажем, как ее toжнo получить из обыкновенных jnuieftnbix систем непрерывного действия, т. е. из тех систем, которые рассматривались в предыдущих пара-гра())ах. Возь.ме.м систему стабилизации те.\п1ературы иепрерьпшого действия (рис. 1.17). Необходимо подде1)живать постоянную температуру объекта, охлаждаемого воздухом. Уп1)авляющим органом являются 1иторки, угловое положение которых ф определяет собой иптенс;ивиость поступления охлаждающего во.здуха. Измерительное устройство сослоит из терморезистора 1, включенного в качестве одного из плеч моста 2, и гальванометра 3, измеряющего ток в диагонали моста. Мост 2 настраивается так, что при .заданной температуре, которую надо под,церживать неиз-Meinioft, ток в диагонали моста отсутствует. Таким образом, измерительное устройство (1,2,3) дает па выходе перемещение стрелки s, и ропо 1)ц и о на л ыюе отклонению температуры 6. 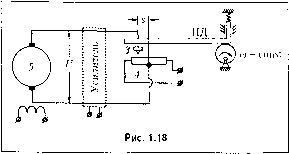 Стречка скользит по иотеицио.метру 4, управляющему работой двигателя 5. Якорь двигателя питается через потенциометр (иногда доиолпепный усилителем). /1,вига-тель 5 через [)едуктор 6 вращает шторки. CyniecTBCHHbiM недостатко.м данной конкретной системы является то, что стрелка гальванометра 3 и.меет значительную .механическую нагрузку в виде трения об обмотку потенциометра. Это заметно снижает чувствительность измерителя, а значит, и всей системы к малым отклонениям регулируемой величины 9. Целесообразно было бы предоставить стрелке гальваио.метра возможность двигаться свободно без нагрузки. Это делается следуюпцш образо.м. На рис. 1.18 изображен вид па стрелку гальванометра 3 с торца (с носика). Носик стрелки движется вправо и влево свободно, не п[)икасаясь к об.мотке потенциометра. Над стрелкой помещена так называе.мая падаюи1ая дужка П/! опирающаяся па эксцентрик, который вращается с постоянной угловой скоростью со. Когда падаю-1цая дужка приходит в нижнее положение, она П1)ижимает стрелку гальванометра 3 к об.мсугке иотеициометра 4 па короткое время, В течение остального периода колебаний ,тужки стрелка 3 свободна. В результате при непрерывном персмещеичп стрелки .ь-иапряже>1ие U, питаюпюе цепь якоря двигателя, будет подаваться с потенциометра в виде коротких импульсов (рис. 1,19). Постояп1И>п 1 период чередования импульсов, или период дискретности 7задаег-ся системе принудительно извне и определяется величиной угловой скорости со вращения эксцентрика иезависимы.м от данной системы приводо.м. Длительность и.м-пульсов т тоже иостояппа. Поскольку nepcMenienne стрелки ,v пропорционально отклонению т-емнературы 6, а скорость вращения вала электродвигателя d(p/dt примерно пропорциональна пи-гающему папряжешю U, то в первом приближении получается импульсная зависимость скорости вращения привсада управляющего органа от отклонения регулируемой величины, показан- ная па рис. 1.20, б. Там же изображен вытекающий отсюда закон движения самого управляющего органа - перелге-nieiine шторок (p(t). В первом приближешп! они равпо.мерио движутся во время подачи импульса и затем стоят на месте в про.межутке между импульса.ми. На самом же деле, конечно, за счет инерционности двигателя при подаче импульса напряжения нарастание и 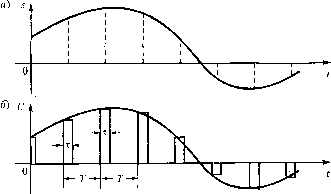
|