
|
|
|
Главная -> Повышение запаса устойчивости I I---4j- Т 2Т ЗТ t О u(i) Г 2Г ЗГ t 01 Г 2Г ЗУ f t о Рис. 15.5 t О Г 27 ЗГ с С целью повышения точцости ЦВМ .может быть использована для повьипепия порядка астат1кзма сис темы или реализации комбинированного управлепия. Повьппепие порядка астатизма, как отмечалось в § 9.1, применяется для устранения устаповивппшся ошибки от задающего воздействия в различных ттювых режи.мах: в пепо/шижиом состоянии, при движении с иостоя1И10Й скоростью, ири движении с постоянным ускорением и т. д. Опо достигается введением в систе.му интегрирующих пли изодромных устройств. Передаточные функции D{z) для их дискретных аналогов ири ведены в табл. 15.1. В непрерывных системах астатиз.му г-го порядка соответствует наличие сомножителя р в передаточной 4)уикции разомкнутой системы W{p), а в дискретных - и;и1ичие сомножитс;ля (г - 1 )взнамепатеме передаточной фушсции разо.\и<иутойсисте\И)1 W{z), так как каждому корню О соответствует корень2 = е = \ . Поэто.му повышеиие порядка астатизма цифровой системы может быть достигнуто лл счет как непрерывных, так и дискретных интеграторов. Приициппальная особенность дискретного интегратора состоит в том, что на его выходе образуется не непрерывный сигнал, а последовательность ы(г), что показано на рис. 15.5. Формируюп[ее устройство при у = 1 сохраняет значение в течение периода дискретности 7и образует сигнал и*. Если окажется, что (г) в установившемся режиме изменяется (рис. 15.5, б и рис. 15.5, в), то сигнал и* будет ступенчатым (раз-рывпы.м). Поэтому следует ожидать, что опшбка системы .между \го.ментами замыкания t = Ибуцет иметь пульсации. Исследуем впача;1е возможность появления нульсацти! исходя из физических соображений. Пусть имее.м статическую пепрерывиую часть систе.мы и D{z) = 1. Тогда в режиме неподвижного состояния (см. § 8.2) будет су]цествовать постоянная статическая ошибка от задающего воздействия, а м(г) и и* будет изменяться так, как показано иа рис. 15.5, й-Сигналы* непрерывный и появление пульсаций исключается.Дляустраиеиия опИ1бкИ можно нсиолыювать как непрерывный, так и дискретш>1Й интеграторы. В любом из этих случаев u{i) н и* будут такими же по форме, как иа рис. 15.5, а, по при пулевой оишбке. Для обеспечения режи.ма лвижепия с постояmioii скоростью в систе.ме, как показано в § 8.2, должен иметься по крайней мере один интегратор. Если он непрерывный, то супсествует постоянная скоростная олпгбка, а u(i) и и* изменяются так же, как па рис. 15.5, а, т.е. пульсации отсутствуют. Если жс этот интегратор дискреттяй, то ири постоянной оншбке сигнал и (г) в установившемся состоянии должен изменяться по линейному закону (рис. 15.5, б). При этом сигнал и* имеет разрывный характер, что приводит к появлегиио пульсаций. Таким образо.м, систе.ма может воспроизводить линейно изменяющееся задаюпюе воздействие без пульсаций (но с оиптбкой) только при наличии в ней непрерывного интегратора. Для устранения скоростной оншбки можно использовать дополнптетьно как непрерывные, так и дискретные интеграторы. Рассуждая аналогично нетрудно убедиться, что для обеспечения движсгшя с но-стоягшым ускорением без нульсагтй в системе должно и.меться не менее двух непрерывных интеграторов. При najunnni одпо1-о непрерывного и одного дискретного интеграторов сигнал W* будет изменяться так, как показано па рис, 15,5, б, а при наличии двух дискретных иггтеграторов - как иа рис. 15.5, о. Для исследования возможности появления пу.чьсаций можно исполь.зовать также формулу (14,102), Из нес с учетом выражения (14,67) получим X ,., (е) = 1пп(2-1) z-->I G(.,e)-iG(z) 1+IV(2) (15.26) Ecjhi окажется, что.г\ .(е) не зависит от е, то и.ульсации отсутствуют, В качестве примера рассмотрим систем}, передаточная функция непрерывной части которой при наличии дискретного аналога нитсг[)ируютего звена с передаточной функцией По формулам (14,60) и (14.62) находим; lV (2,e) = /ciZ::, Щ{г)=К, dik z-d z-d Передаточныефункцииразомкиутойсистемы(15,10) и (15.9) имеют вид .z~d-(z-l)d W{z,e) = Diz)Wa{z,e) = KT W(z) = D(z)W,(z) = Kr (2-l)(2-J) (2-l)(2-J)- В режиме неподвижиого состояния :!ада10Н1ее воздействиеg(f) = Его изображение G(2,e) = f;(2) = . По формуле (15.26) находим установившуюся онтбку системы Xy (e) = limgo (2-1) z-d-KT(l-d) (2-)(2-1) + ет(1-) = 0. Таким образом, при введении дискретного интегратора статическая ошибка полностью устраняется, что соответствует сделан по.му ранее выводу. В режиме движения с постоянной скоростью, т. е. upHg{t) = Vt, имеем G(z,e) = -[l + e(2-l)], G(2) = J%. (2-1) Аналогично нредыдуиге.му получаем: (г-1) усг(е) = - 1-КТ \-d \-d Скоростная ошибка зависит от е, что (как и ожидалось) свидетельствует о наличии пульсаций .между моментами замыкания г = гТ. В моменты вре.мени t = Г/она совпадает со скоростной ошибкой системы при наличии одного пепрерывпого интегратора: дг ( = V/K. На рис. 15.6 это показано для случая Г/Г, = 0,5,ЛГ= 5. В цифровых системах возможно использование комбинированного управления по задающему или возмущаюгцему воздействия.м. При вынолнегти заданных условий по точности ко.мбипированное управление позволяет снизить требования к основному каналу. Комбинированное управление особенно удобно применять в тех случаях, когда задаюнгее воздействие вычисляется в унравляюнюн ЦВМ. В этом случае па ЦВМ может быть также возложена задача вычислегиш производных этого возлействия, что позволяет просто реализовать схемы, аналогичные рассмотренным в § 9.2. Подобное положение возникает, например, при слежении телескопов за планетами, ири управлении но счисляемым координатам и т. Н-Структурная схема системы комбинированного управления для случая использования дополнительного канала с передаточной функцией E{z) но задающему воздействию и.зображепа на рис. 15.7. 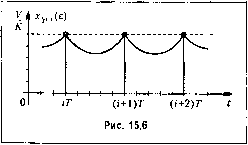
|