
|
|
|
Главная -> Повышение запаса устойчивости Таблица 4.4. Временные характеристики интегрирующих звеньев Тип звена и передаточная функция Перехолпая функция Функция веса Идеальное W{p) = -Р  h(t) = к 1(f) с замедлением рО+Тр)   h(t)-k[t-T{l - е-/)]. 1(0 Изодромное Wip)-Mk,J-, h(i) w(t) h(t) = (kt + k,) i(t) 2. Интегрирующее звено с замедлением. Звено описывается дифференциальным уравнением dt dt (4.44) Передаточная функция звена W{p) = р(иГр) (4.45) Примером такого звена является двигатель (рис. 4.10, а), если в качестве выходной величины рассматривать не угловую скорость, а угол поворота, являющийся интегралом от угловой скорости, к такому же типу звена сводятся демифер (рис. 4.18, б), серводвигатель (рнс. 4.18, в), иитегрируюндай привод (рис. 4.18, г), есди более точно рассматривать их уравнения движения, и др. Интегрирующее звено с замедлением можно представить как совокупность двух включенных последовательно звеньев - идеального интегрируюп1его и апериодического первого порядка. Тип звена и частотная передаточная функция Амплитудно-фазовая Амплитудная и фазовая Логарифмические Идеальное
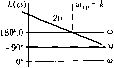 Интегрирующее с замедлением k -кт- 0<-оо Л(со) 4/{ю) -90° -180° 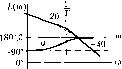 Изодромное
Л(<о) LV.. 90° 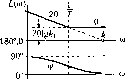 Для нахождения временных характеристик удобно передаточную функцию представить в виде алгебраической суммы k kT р(1 + Гр) p \ + Тр что позволяет представить решение дифференциального уравнения (4.44) в виде суммы реп1ений для идеального интегрирующего звена и апериодического звеиа первого порядка. Временные характеристики приведены в табл. 4.4, а частотные - в табл. 4.5. Л.а.х. строится но выражению Х, = Р > Х2 = и 1 1 X2 = U2- u,4-YJu,dt
Рис. 4.19 L(co) = 20lg (4.46) Асимптотическая л. а. х. представляет собой две пря.мые с отрицательными наклона.ми -20 дБ/дек (при ш < 1/7) и -40 дБ/дек (при ш > 1/Т). 3. Изодро.мное звено. Звено описывается уравнением dx.2/dt = kxi + ki dXi/dt. (4.47) Передаточная функция .звена wip)Ak, = , р р (4.48) где Т= k,/k - постоянная вре.мени изодромпого звена. Из этих выраже1И1Й видно, что звено можно условно представить в виде совокупности двух звеньев, действующих параллельно, - идеального ицтегрпрующе! о с коэффициентом передачи k и безынерционного с коэффициентом передачи к,. Примеры изодромиых звеньев изображены па рис. 4.19, Таким звеном может быть комбинация пружины с демпфером (рис. 4.19, б). В качестве входной величины .здесь расс.\гатривается прикладываемая сила F, а в качестве выходной - перемещение х точки а, в которой приложена сила. Это перемещение складывается из деформации пружины F/C, где с - жесткость пружины, и перемещения поршня 1/5JF, где S ~ коэффициент CKopocTnoio сопротивления демпфера. Результирующее перемещение точки х = Г/с+ l/SFdl.
|
|||||||||||||||||||||||||||||||||||||||||