
|
|
|
Главная -> Повышение запаса устойчивости ной последовательности замыкает свои контакты. Эти контакты пронумерованы цифрами, помещенными рядом. В соответствии с нослсаовательной работой прог]:)аммио-го устройства рассмотрим работу схемы. 1-е положение. Замыкается контакт 1, который на короткое время включает конденсатор С. Конденсатор заряжается до значения напряжения и. Далее нри раз.мыкании контакта 1 это напряжение зано.минается на конденсаторе. К нему подключен усилитель с больпщм входным сопротивлением и коэффициентом усиления, равным единице. Выходное нанряжение усилителя будет равно заномпепному на конденсаторе напряжению Uy. 2-е положение. Замыкаются контакты 2. Один из них включает па короткое вре.мя силовое реле CP, которое подводит напряжение к реверсируемому серводвигателю Д. В результате управляемая величина изменится па определенное значение Дг/, т. е. система сделает один шаг . Второй контакт 2 также па короткое время подключает к напряжению источншса гюстоянного тока обмотку поляризованного реле РП 1. Это делается для того, чтобы поля])изованное реле запоминало направление шага. В начале работы схемы положение поляризованного реле РП2 ,\южет бьггь произ-вольны.м. Поэтому трехпози пион нос силовое реле может В1С1ючаться в произво-мьпую сторону, и шаг для поиска экстре.му.ма делается также в произвольную сторону. 3-е положение. Замыкается па короткое время контакте, который включает обмотку реле РП2 на разность напряжений до и после шага. Ecjni напряжение увс.чичилось после шага, реле РП2 остается включенным в прежнем положении. Если это напряжение у.меиьшилось, реле РП2 переключится в другое положение и подготовит включение СИЛ0В010 реле в следующем цикле в другую сторону. Это остается справедливым и в том случае, когда контакт реле РП2 включен пе наверх, как пока.зано на рис. 2.5.5, а вниз. 4-е и о л о ж с н и е. На короткое время замыкается контакт 4, который замыкает конденсатор С и стирает записанное (запомненное) па нем напряжете и. Тем са.мым схе.ма подготавливается для следующего цикла работы, который протекает аналогично. На рис. 25.7 изображена структурная схема рассмотренной экстремальной системы. Значение управляемой величины, соответствующее точке экстремума, обозначено г/ . В схе.му введен и\и1ульсный .элемент ИЭ, соответствуюпшй ншговому характеру работы схемы, и нелинейный элемент НЭ. Наличие нелинейного элемента вызвано тем обстоятельство.м, что величина шага системы 1Юстояпна и меняется только направление самого шага. Это и обеспечивается НЭ с идеальной 1)елейной характеристикой. Серводвигатель совместно с управляюпшм органом, изменяющим значение управляемой величины, представлен в виде некоторой непрерывной части W2 (р). Непрсрывиы.м звеном является также са.м объект Wy (р). 11роцессы в дащюй экстремальной системе .\югут изучаться при помощи .моделирования структурной схемы (рис. 25.6). Могут использоваться также апалитические методы исследования нелинейных и.мпульсиых систе.м (см. 1Л, 23). 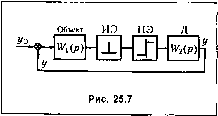 Как следует из структурной схемы, в системе весьма вероятны автоколебания около точки экстремума. Это объясняется тем, что звено с идеальной релейной характеристикой при мачых входных с1Н-налах и.меет коэффициент передачи, стремящейся к бесконечности. Поэтому и этой схеме будут присущи потери на поиск в соответствии с формулой (2.5.17). § 25.2. Самонастраивающиеся системы Самонастраивающиеся систе.мы до.чжны обеспечивать необходи.мое качество процессов управления ггри из.меиении свойств объекта управления и элементов управляющего устройства, а также при из.меиении характеристик возмуп1ающих сил. В отличие от экстремальных (поисковых) chctc.vi .здесь са.мопастройка часто осу-пюствляется аналитическим путем безоргапиза1Н1И процессаiioncKa. Самонастраивающиеся системы подоб[к)го типа называют бсспоисковы.ми. Теория са.монастраиваю-щихся систе.м и.зложепа в работах [26,40,611. Систе.мы с разомкнутыми цепями самонастройки. Эти системы используются в практике уже сравнительно больнюе время. Структурная схема подобной системы изображена на рис. 25.8. Здесь и W2 обозначают передаточные функции части систе.мы. Пусть W2 - передаточная функция объекта и управляюн1его устройства, а - передаточная функция пскоторогб звена, которое будем называть корректирующим устройство.м. Под влиянием внешних возмущений.. .,/ происходит изменешю иередаточной функции И2- Для KONHicncauHH из.мснеиий эти же воз.мущепия подводятся к корректирующему устройству с целью изменения его нередаточной функции 1У,. Передаточная функция за.мкнутой системы W,W2 (2.5.27) Очевидно, что для получения постоянства (25.27) пеобходи.мо выполнить условие W, W2 = const. Поэтому передаточная функция корректирующего устройства должна меняться по зависимости > 12 (25.28) /1 /г, I I I I I I л I I I i i I I I
и, =~-Jui +ul .sn)Ai/ = M.>.sinAii/, re, где Д\/ - рассогласование между сигнальной об,моткой и осью, перпендикулярной 1ЮТоку статора. Для малых углов получаем крутизну чувствительного элемен та: рад] 57,3 2 град При малых модулях строяще1-ося вектора напряжепие U2 мало и мала крутизна чувствительного элемента. Поэто.му построение будет производиться с большой ошиб- где WjQ п - псредаточпые функции для некоторого начального состояния системы. Выполнение условия (2,5.28) сопряжено со зпачительными трудпостя.ми вследствие того, что нельзя точно и по;нк)стьк) учесть все возможные воздействия на объект. Кроме того, точная реатзапия зависимости (25.28) во многих случаях затруднительна вследствие технических трудностей. По.этому во .многих случаях реализуется приближенное выпо.тнение этого условия. В качестве примера рассмотри.м систему авто.матического построения вектора но двум составляюнтм (рис. 25.9). Пастаторныеоб.моткисинусно-косипусного Bpaniaio-щегося трансформатора СКВТ поступают напряжения переменного тока и и, действующие значения которых пропорциональны проекция.м вектора па оси х и г/. В СКВТ образуется переменный магнитный поток, амплитуда которого пропорциональна мо- ду;ио вектора: Ф = kJuj + г/ = kyjx + , а ось его составляет с осью обмотки, па и у которую поступает напряжение м,., угол ц/ = arctg = arctg -. Следящая систе.ма по- ворачивает ротор СКВТ до тех пор, пока напряжение па сигна-чыюй об.мотке ротора, включе11Ной на вход усилителя, не станет равным нулю, точнее, мини.матьпым. Тогда ось сигнальной обмотки будет перпендикулярна оси потока статора. Ось второй (квадратурной) обмотки ротора будет совпадать с осью потока. На второй обмотке будет напряжение, действующее значение которого пропорционально .\юдулю искомого вектора: где да, и ffi)2 - числа витков статорных и роторных обмоток. Угол .между осью квадратур1ЮЙ об.мотки ротора и осью обмотки статора, на которую подается напряжение и, является аргу,мептом у вектора, который строится. При построении вектора следящая система работает в различных условиях в зависимости от ве.нгчины .модуля строящегося вектора. Это объясняется тем, что К15утизпа чувствительного элемента, которым является сигнальная обмотка СКВТ, зависит от амплитуды .магнитного потока Фм, т. е. от модуля вектора. Эта крутизна может быть определена из известного для СКВТ выражения для напряжения сигнальной об.мотки:
|