
|
|
|
Главная -> Повышение запаса устойчивости 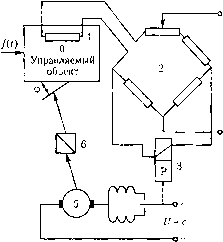 Рис. 1.25 Релейные системы авто.матического управления можно отнести, как и и.м-пульсные, описанные выше, к категории систе.м прерывистого действия, но их существенное отличие от импульсных систе.м заключается в том, что релейные систе.мы по са.мому принципу своему являются нелииейны.ми. Дело в то.м, что здесь .моменты времени, в которые происходит замыкание и размыкание системы, заранее неизвестны; они ие задаются извне, а определяются внутренними свойства.ми самой системы (ее структурой и величи-на.ми ее пара.метров). Эти.м обусловливаются и основные специфические особенности динамики процессов управления в релейных системах. В качестве це])Вого примера релейной системы рассмотрим систе.му стабилизации температуры примерно той же структуры, как на рис. 1.17, но с тем отличием, что вместо импульсного элемента для управления работой П1)Ивода пггорок в пей поставлено релейное звено - в даппо.м случае поляризованное реле 3 (рис. 1.25). Его средний контакт в зависимости от знака тока в диагонали! моста 2, т. е, в зависи.мости от знака отклонения управляемой величины 9, замыкается с нижним или верхним копгакто.м, вкJиoчaя ток либо в одну, ;шбо в другую обмотку возбуждения двигателя, в результате чего получаем либо одно, либо другое направление движения шторок иа объекте Из сети в }правляемую цепь реле (цепь контактов) подается постоянное напряжение и = с. Напряжение U, интающее двигатель, из.меняется в :ивиси.мости от величины тока / в диагонали .моста но одно.му из законов, изображе1И1ых иа рис. 1.26. Нентраи>ному положению среднего контакта реле соответствует значение U - О при малых величинах тока -Ь < I < b (рис. 1/26, а). При некоторой величине тока I = h реле с[)абатывает, включая напряжепие [/ = с в одну из об.моток двигателя. При об-ратио.м направлении тока /, которое считается отрицательпы.м, будет та же картина срабатывания при / = -h, причем то же самое напряжение U включается в другую об.мотку двигателя и задает еьлу другое панравление вращения. Это направление будем считать отрицательпы.м и поэтому напряжение в этом случае будем от.мечать знаком минус: U = -с. Интервал -h < К Ь, где U = О, называется зоной нечувствительности реле. Показанная зависимость выходной величины реле U от входной / называется статической характеристикой реле Как известно, величина тока срабатывания реле не совпадает с величиной тока отпускания. При учете этого обстоятельства получаем петлевую статическую хдрак-теристику (рис.1.26, б), где - величина тока срабатывашш, a.b~ тока отпускания. Эта петля аналогична той, которая получается при гисгерезисиых явлениях. Поэто.му и в даппо.м случае ее называют гистерезисной петлей. Если петля не unipo-ка, то ею часто пренебрегают. Рис. 1.26
Зона нечувствительности реле, имеющая место в этих двух статических ха[)акте-ристиках, получается в то.м случае, когда средний контакт поляризованного реле обладает нейтральным положением. Если этого пет, то он будет сразу перескакивать из одного крайнего положения в другое (рис. 1.26, в). Это - идеальная релейная характеристика без зоны нечувствительности и без петли. Реальная характеристика реле и в данном случае тоже будет иметь петлю (рис. 1.26, г), половину нифины которой обозначаем через h. Это ~ характеристика реле с петлей без зоны нечувствительности, т. е. без среднего нейтратьного положения. В ириведепном примере в релейную систему входило электромагпитно.е реле, управляюпюе работой привода двигателя. Однако к релейны.м системам управления относятся не только системы, содержащие имерпю реле, а всякие систе.мы, в составе которых есть звенья (любой физической природы), обладающие статически.ми характеристиками релейного типа, когда выходная величина звена из.меняется скачкообразно при непрерывном изменеши! входной величины. Приведем типичный пример релейной системы, в которой сам управляющий орган работает в двухпозициопном режиме. Это - вибрационный регулятор напряжения на клем.мах генератора постоянного тока. Принципиальная схема показана па рис;. 1.27. Управляемая величина - напряжение U. При отклонении пап)я-жения изменяется ток в обмотке электромагнита. Это создает изменегше тяговой силы .элект- Пружнна 2 1 К J ш ромагнита. При уменьшении последней пружина замыкает контакты К, вьиотючая добавочное сопротивление из цепи возбуждения генератора. Следовательно, управляющий орган (коигакты) здесь будег имегь релейную характеристику, показаипую на рис. 1.28. Релейные системы но сравнению с пеирерывиыми системами обладают тем преимушество.м, что не требуют высокой стабильности элементов для соблюдения определенной зависимости .между выходной и входной величина.ми. . OiHi работают ио принципу да-нет , т. е. по наличию или отсутствию входного сигнала и его знаку (с определенным порого.м срабатывания).
Рис. 1.28 Глава 2 ПРОГРАММЫ И АЛГОРИТМЫ УПРАВЛЕНИЯ §2.1. Программы управления Одной из задач системы автоматического управления является, как уже говорилось, поддержание требуемого зиачепня управляемой величины у или изменение се по определенной программе, которая либо заранее задается, jhi6o поступает извне во вре.мя эксплуатации системы в зависимосги от некоторых ус.човий. Програ.ммы могут быть временпьши (задаваемы.ми во времени): или параметрическгши (задаваемы.ми в текушнх координатах): y=yi.S\,S2, ...,s ), где ,s2 v - какие-либо физические величпшя, характеризующие текущее состояние объекта в процессе управления. При.меро.м временной программы может служить программа изменения управляемой величины, обеспечивающая правильный режим начального разгона объекта при пуске его в ход до наступления режима nop.MajTbHOfl эксплуатации, в котором объект затем будет работать длительное в])емя. Например, система стабилизации угловой скорости мощного двигателя может быть нредиазначена не только для иоддержапия постоянной с.-корости li режиме нормальной эксплуатации, ио еще и для обеспечения требуемого режима нарастания скорости во времени (рис. 2.1, где у - угловая скорость) при пуске двигателя в ход, чтобы избежать каких-.чибо опасных отклонений. Аналогичная ирогра.мма управления во времени может задаваться при тер.мической обработке металлов, когда требуется определенный режи.м быстрогы нагревания металла (рис. 2.1, где у - темпе)ачура в  1 Нор.малышя Раз1-он I эксплуатация
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||