
|
|
|
Главная -> Повышение запаса устойчивости ствии с этим структурная схема этой экстремальной системы может быть сведена к структурной схеме следян1ей системы (рис. 25.4). Входной величиной является значение емкости Сд, соответствующее экстремуму. Это значение связано с частотой полезного сигнала и индуктивностью приближенны.м соотпопюние.м (при пренебрежении влиянием активных сопротивлений) ДСч Ф1 4>2 Ч\ R2 1 Рис. 25.4 В контур структурной схемы входят апериодические звенья, соответствуюпше фильтра.мФ, и Ф2, иинтегрируюп1еезвепосза.медлепием (двигательД,). Ре.зульти[)у-юн1ая передаточная функция разомкнутой системы р(\ + Тр)(\ + Т,р)(\ + Т2р) где Г - электромеханическая постоянная времени двигателя. Г, и - постоянные времени фильтров. На рис. 25.4 показано также воздействие/от неподав;1епной переменной составля-Ю1цей на выходе синхронного детектора и воздействие ДС, представляющее собой помеху во входном сигнале. Как следует из рис. 25.4, исследование дина.мики рассматриваемой экстремальной системы сводится к исследованию следяп1ей системы. Поэтому .здесь Н[)И.мени,мы все методы, исиолызуемые в непрерывных автоматических системах. Поми.мо обычных показателей качества д-ш экстремальных систем используется еще одна характеристика - потери на поиск. В установивп1е.мся режиме управляемая величина колеблется около значения, соответствующего экстремуму функции F(y). Вследствие этого среднее значение :-)той функции отличается от экстремального. Среднее .значение разности F-F. обуслош1ен-ное колебания.ми поиска в установнвпщ.мся режиме работы системы, называется потерями на поиск. Поскольку в точке экстре\гу.ма первая производная - = 0, то ра.зпость между текуншм н экстремальны.м значения.ми функции F(y) можно представить в виде степенного ряда -,Л(д,)4(д,)3.... 2 dy б dy- (25.1G) Управляемая система W(p) W(p) W(p) Рис. 25.5 Здесь частные производные соответствуют точке экстре.му.ма, а Дг/ - отклонение от этой точки. Если в (2.5.16) можно ограничиться только первым ч.лепом [)яда, т. е. использовать квадратичную форму, то потери на поиск можно представить в виде F-F=- 1 с1Ч- 2 dy (25.17) где Ау - средний квг1дратот1аюиения управляе.мой величины от значения г/. с(Ютвегствуюи[его экстремуму. При гармо1П1ческом поиске с амплитудой Л сред- пин квадрат Ау = В общем случае наличия нескольких перемиитых f (г/ ..., г/ ) потери па поиск определяются суммой 1 Ar/2f (25.18) Рассмотрим исследование дгжамики экстремальной системы при F. = F (у,.. .,у ) для случая поиска экстрему.ма по способу градиента. Структурная схема для этого случая изображена на рис. 25.5. В.место (25.13) здесь будут иметь место более сложные зависимости: У1=ЩР) (г- = 1,2,...,и) (25.19) или, в ином виде, W{p) dF У\ , Р dyi (г = 1,2,.. и). (25.20) где W{p) - передаточная фушсция, одинаков;1я для всех каналов. Для малых отклонений от точки экстремума разность F~ 7 может быть представлена в виде квадратичной формы: (25.21)
(25.22) i.k=\ (25.23) для экстремума-минимума представляет собой э.тлипсоид, называемый онределяю-П1ИМ эллипсоидом. Поверхность i.k=\ (25.24) соответствует определяющему эллипсоиду экстремума-макси.мума. В теории квадратичных форм показывается, что для малых откл(Л1ений уравнения (25.20) могут быть записаны в виде (25.25) где с, - полуоси онрсделяющего эллипсоида; знак плюс соответствует минимуму и знак минус.....макси.муму Из (25.25) получаются характеристические уравнения для каналов; та 1.1=0. Р cf (25.26) Здесь знак введен в передаточную функцию W(p), которая должна быть положительной для экстремума-.максимума. Таким образом, исследование динамики при F= f (г/;,.. .,г/ ) сводится к анали,зу?г изолированных каналов, которым соответствуют характеристические уравнения (25.26). Рассмотрим теперь систему с шаговым поиском. На рис. 25.6 изображена схема шагового поиска макси.мального значения функции F(y). В управляемом объекте эта функция должна превращаться в напряжение постоянного тока м, по линейной или иной зависимости. Схе.ма осуществляет поиск максимального значения и. Изменение управляемой величины у осуп1ествляется серводвигателем Д. Работа всей схемы происходит при ио.мопш управления от временного програ.ммного устройства, которое в определен- 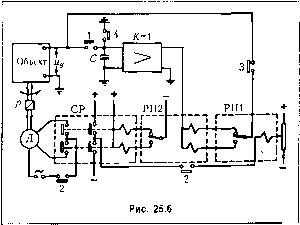
|