
|
|
|
Главная -> Повышение запаса устойчивости в соответствии с формулами (12.73) и (12.82) имеем или в соответствии с фор.мулами (12.75) и (12.83) 1 М I М М-Г ш,р М + 1 Для уточнения расчета можно учесть то обстоятельство, что по сравнению с системой, имеющей астатизм второго порядка, здесь имеется дополнительный запас по фазе Др = arctg-. (12.94) Это позволяет немного увеличить допусти.мую сум.\гу постоянных времени, ко-торы.м соответствуют сопрягающие частоты правее частоты среза (формулы (12.82) и (12.83)), или немного у.мепытггь постоянную времени Гг (формулы (12.73) и (12.75)). Однако подобное уточнение обычно ие имеет практического значения [9] и почти всегда с достаточной степенью точности можно вести расчет параметров л. а. х. тина 1-2-1-2-3... по формулам, которые были получены для системы с астатизмом второго порядка (л. а. х. типа 2-1-2-3...). Типовые л. а. х. статических систем. В простейпгем случае передаточная функция разомкнутой статической системы имеет вид (1 + Тор)(1 + 7р) где К - коэффициент передачи разо.мкнутой системы. ствующей л, а. х, тина 2-1-2-3... система с астатизмом второго порядка (рис, 12.12) добавлением одного и.злома при сопрягающей частоте ю, = l/T Этой л. а. х. соответствует передаточная функция разомкнутой системы ()=ГТГТ7-Г (12.93) Так как обычно сопрягаюн1ая частота щ значительно отличается от частоты в зоне максимума требуемого запаса ио фазе, то с большой степенью точности расчет можно вести ио формула.м, полученным д-ш систем с астатизмом второго порядка. В это.м случае иоложение л, а. х., изображенной на рис. 12.16, определяется базовой частотой
(12.97) Это дает возможность использовать полученную выше формулу (12.90) для л. а. х. типа 1-2 (рис. 12.15) при за.мене Kq на щ. Тогда можно получить условие обеспечения заданного показателя колебательности щ мЧмУм-1 Го 2 Для передаточной функции более сложггого вида Wip) = (1 + 7ор)(1 + 7 (1 + Г2р),.. апа7гогичцо (12,92) и.меем 7С(Г,+Г2 + ...) (М<1,3). (12.98) (12.99) (12.100) Из этих фор.мул видно значение первойбольшой постоянной времени Г как фактора, уве.шчиваюшего запас устойчивости систе.мы. Повышение коэффициента передачи или повышенпе су.ммы остальных постояньгых времени при заданием показателе колебательности .может быть сделано при одгтвреметиюм увеличении постоянной времени Гд, Отклонение передаточной фуггкции (12.96) от более точного выражения (12.95) в области низких частот дает некоторое увеличение запаса устойчивости, т. е, уменьшение колебательности. Учет этого обстоятельства обычно нецелесообразен ввиду незначительности получаемого эффекта [9]. При HOBbiHjeHHbix требованиях по статической и динамической точности могут применяться л. а. х. типа 0-1-2-1-2-3... (рис. 12.18), образова1Н[ые из л. а. х. типа 2-1-2-3... (рис. 12.10) систе.м с астатнз.мом второго порядка. Таким л. а. х. соответствует передаточная функция разо.мкнутой систе.мы К(\ + Т2Р) (1 + Гор)(1 + Г, р)(1 + 7з р)(1 + Г, р)... 201g/Cl 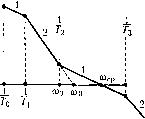 З со Рис. 12.18 Как и в случае систем с астатизмом первого порядка, здесь можно с достаточной степенью точности пользоваться универсальными формулами (12.73)-(12.76) и (12.82), (12.83). Учет звеньев постоянного запаздывания и колебателыН)1Х звеньев, а также введение Гранины .малых постоянных времени .может делаться аналогично изложенному выше. Перехо/аП)1е процессы, соответствующие типовым л. а. X. Для л. а. х. типа 2-1-2 можно показать, что при заданной протяженности h аси.мптоты с едипичны.м наклоном (рис. 12.10) выбор параметров, при которо.м обеспечивается .минимальное значение показателя колебательности (12.70), в.месте с тем соответствует некоторому оптимальному протеканию переходных процессов. При этом будет иметь место .максимальное приближение кривой нерехо/тиого процесса к некоторой экстремали, которая является экспоне1Ггпой с постоянной времени Т - (Oq/г~. Чем больпю протяженность участка h, те.м меньше показатель колебательности и те.м более благоприятным будет протекание переходного процесса, так как постоянная времени экспоненты будет .меньше. Онредели.м вид переходного п])Оцесса при единичном входпо.м воздействии в) = 1 (О для случая использования л, а. х. типа 2-1-2 (рис. 12.10). Для нормировапной иередаточной функции (12.64) изображение Лапласа выходной величины будет и.меть вид хУ +q +X2q + i Ч (12.102) Задаваясь ра.зличны.ми значениями показателя колебательности, можно найти относительные постоянные времени 2 = (йо2 з Ъз атем построить переходный процесс для выходной величины 62 в функции безраз.мерного времени щс Переходные характеристики показаны иарис. 12.19. Параметры переходных процессов - перерегулирование а% и отпосительное вре.мя переходного процесса cOof - для I 1 -в2(Ю(/) I < 0,0.5 приведены в табл. 12.7. Хотя эти кривые переходных процессов соответствуют л. а. х. типа 2 -1-2 системы с астатизмом второго порядка (рис. 12.10), они с большой степенью точности .M017T использоваться для оценки иереход1И.1Х процессов при использовании л. а. х. другах типов, изображенных, например, на рис. 12.13, 12.16 и 12.18, для которых характерным яв.1яется наличие участка с наклоном -20 дБ/дск в районе пересечения оси частот. \А 1,2 1,0 0,8 0,6 OA 0,2 О
4 шо
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||