
|
|
|
Главная -> Повышение запаса устойчивости пое ускорение слежения е ,. = 10 град/с : максимальная допустимая опшбка 9 ,., = = 4 угл. мни.; допустимый показатель колебательности М = 1,5; период дискретности 7 = 0,02 с; передаточная функния пеирерывиой части имеет вид р(\ + Т,р){\ + Т р){\ + Г,р) 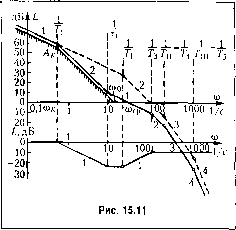 где Г; = 0,05 с, Гц = 0,003 с, Гщ = 0,001 с. Определим вид и параметры последовательного корректирующего ;шена, которое должно быть включено в непрерывную часть системы, а также необходимое зпаче1Н1С ко-:-)ффициеита пе])едачи ра;юмкнутой сгкгтемы К. Левее частоты сре;ш л. а. х. дискретной системы совпадает с л. а. х. се непрерьииюй части, а псевдочастота Х - с реальной частотой со. Позто.му формирование желаемой л. а. X. левее частоты среза произведем обьнппьми приемами. Построим .запретную зону для л. а. х. из условий точности (рис. 15.11). Контрольная частота со, =- Simax 20 10 -1 = - = 0,3 с \ Модуль передаточной функции ра.зомкпутой системы при со = со W;,(>k) I- = 6QQ = 55,6 дБ. 10-4 По этим данным на рис. 15.11 построены контрольная точка и запретная зона, сформированная из прямых с наклоно.м -20 и -40 дБ/дек (наклоны 1 и 2). Желаемая л. а. х. в низкочастотной области формир)уется так, чтобы она проходила выше точки А на 3 дБ. Она состоит из отрезков прямых с наклонами 1-2-1. В низкочастотной области частотная передаточная функция разо.мкнутой системы имеет вид W (jco) = М1 + ]ш7\У Параметры желаемой л. а. х. и передаточной функции разомкнутой системы в низкочастотной области определим в следующем порядке. Базовая частота л. а. х. = jV2bni=jl,41- = 14,5 с I locTOKHiiiw времени корректирующего звена, формирующая первый взлом л. а. х г, = - = - = 2 с. (0 0,5 Для получения заданного показателя колебателътюсти должно выдерживаться условие (формула 12.73) 1 / М т, = 0)0 М-1 Отсюда получаем значение Biojjoii постоянной вре.мени корректируюп1его звена: 14,5 =0,12 с. Далее определяем необходи.мое значение коэффициента передачи разомкнутой системы: К = 2 = и\ = Ш с-\ в, . 4 п частоту среза л. а. х.: Для обеспечения заданного показателя колебательности в высокочастотной области должно удовлетворяться неравенство (15.49): Т А, 1 М - + > Г: <---, 2 f-, ю,р М + 1 где =7V сумма постоянных времени меньших, че.м Т/2. Отсюда получаем допустимое зпачепие для сум.мы постоянных времени: r,<-l-J-I = -J:l-M = o,014 с. а),р М + 1 2 2.5,2 1,5 + 1 2 Нарис. 15,11 пунктиром построена л. а. х. непрерывной части necKoppcKTHpoBairj ной системы, сплоннюй линией - желаемая (скорректированная) л. а. х. непрерывной части. В низкочастотной области (до частоты среза щ.) oira совпадает с л. а. х. дискретной систе.мы (см. рис. 15.10, а; нарис. 15,11 л. а. х. дискретной системы не изображена). В области высоких частот вид желаемой л. а. х. непрерывной части, B0o6nie говоря, может быть произвольным. Важно только, чтобы сумма ностоянных времени пе превып1ала допустимого значения. Наиболее простые корректирующие звенья получаются в тех случаях, когда сопрягающие частоты л. а. х. иескорректироватюй системы и желаемой л. а. х. совпадают между собой. В рассматриваемом примере Целесообразно принять 7\ = Г = 0,003 с, Гз + 7 , i = 0,001 с. То-да Тг - h - Та - Тг, = 0,014 - 0,003 - 0,001 = 0,01 с. Вычитая из ординат желаемой л. а. х. ординаты характеристики пескорректиро-ваппой системы, получим искомую л. а. х. иоследовате.тьного корректирующего звена. Она соответствует интегро-дифференцирующему звену с передаточной функцией - (Ur j;)(l + r j;) Г =Л = 2с, Г2, = т, = 0,12с, Гз, - у; = 0,05 с, Г,-Гз = 0,01 с. Из нриведеп}[ого примера видно, что при синтезе непрерывных последовательных корректирующих устройств .метод логарифмических частотных характеристик не теряет своей простоты п наглядности. Более детально 1Н1фровые системы рассмотрены в работах [8,39,48].
|