
|
|
|
Главная -> Повышение запаса устойчивости получаем значение модуля результирующей частотной передаточной функции \У0-(0) =Л((0) = Д,((0) (6.44) и фазы V((0) = - (ОТ. (6.45)
Рис. 6.25 Таким образом, наличие звена с запаздыванием не меняет модуля и вносит только дополнительный фазовый сдвиг. На рис. 6.25 изображена амнлитудно-(})а.зо-вая характеристика, соответствующая (6.43). Силопиюй линией показана исходная характеристика при т = О, а пунктиром - характеристика, которая получается при наличии постоянного запаздывания т/0. Из этих характеристик видно, что наличие допол1И1тельиого фазового сдвига Д\/ = (ОТ закручивает годограф, особенно в высокочастотной части, но часовой стрелке. Это, вообще говоря, ухудннхет условия устойчивости, так как вся кривая приближается к точке (-1, jO). Иногда в особых случаях при сюжной (1)орме годографа WoOco), введение постоя1Н1ого запаздывания может улучшить условия устойчивости. По имеющемуся годогра(})у ИоОй) можно определить критическое значение времени запаздывания т = тр, при котором система оказывается на границе колебательной устойчивости. Для этой цели па годографе WqC/co) отыскивается точка, для которой модуль равен единице (рис. 6.25). Частоту, соответствующую этой точке, обозначим (о а фа,зу - Vi, При введении постоянного запа.здывапия т = тр условие совпадения этой точки с точкой (-1,70) запишется следуюнщм образом: откуда критическое значение запа.здывапия 71 + V, (6.46) Если подобных опасных точек будет несколько, то необходимо сделать расчеты для всех точек и взять наименьшее значение тр. Замети.м, что частота со, равна частоте среза л. а. х., со, = сор (см., напри.мер, рис. 6.18). Поэтому нахождение со, и Ц!, удобно делать при наличии ностроеппых л. а. x. и л. ф. x. Л. а. x. системы с запаздыванием совпадает с л. а. х. исходной системы (без запаздывания). Дополнительный фазовый сдвиг, который надо учесть при построении л. ф. x. системы с запа.здыванием, определяехя (6.45). В некоторых случаях .могут использоваться аналитические расчеты. Так, например, рассмотрим статическую систему с одной ностоя1июй времени. Частотная передаточная функция разо.мкнутой систе.мы имеет вид Wo(j(o) = --. (6.47) 1-1- jcor 0,8 0,6 0,4 0,2
о 2 4 6 8 10 12 14 * Рис, 6,26 Приравняем модуль единице: К :=1. Отсюда находится частота, соответствующая опасной точке: (О, =- Фазовый сдвиг на этой частоте \;, = -arctg(o,r = -arctg/К -1. По формуле (6.46) находим критическое запаздывание: 1у1к-1 ,n-arctg>/K2-l 7i-arctgVA -1 n-arctg> (6.48) 1 По этому выражению па рис. 6.26 построена область устойчивости в координатах общий коэффициент усиления - относительное запаздывание . § 6.7. Устойчивость систем с распределенными параметрами Системой авто.матнческого управления с распределенными параметрами называется такая система, среди уравнений которой кроме обыкновенных дифференциальных уравнений имеются уравнения в частных производных. Физически это соответствует учету волновых яв;1епий или гидравлического удара в трубопроводах, учету волновых процессов в длинных электрических линиях прн передаче по ни.м воздействий от одного звена системы автоматического управления к друго.му или же при управлении процессами в самих трубопроводах или длинных линиях. Этот вопрос приобретает практическое значение чаще всего в некоторых системах управления, включающих в себя водяные, масляные или газовые трубопроводы (либо в объекте, либо в управляющем устройстве), реже - в некоторых системах телерегулирования (телеуправления)и т. и. Известно, тгапри.мер, что водяной трубопровод гидротурбины описывается без учета потерь уравнениями dh dh dv dt g дх где V - скорость движения воды; - напор в произвольной точке, определяемой координатой X вдоль трубопровода; а - скорость звука в воде. Уравнения длинной электрической линии без потерь имеют вид; di ди дх dt 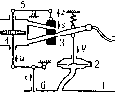 Подача -/(О =-ТГ к потребитсгям Рис. 6.27 где и - напряжение; г - ток в произвольной точке, определяемой координатой х вдоль линии; / и с - индуктивность и емкость единицы длины линии. После ренгения указанных уравпепий в частных производных с учетом граничных условий, определяемых смсжпы.мп звеиья\и1 даппой системы автоматического управления, для системы в целом получаются уравпепия того же типа, как и для систем с запа:дываиием (§ 6.7). Рассмотри.м вывод уравпепий системы стгюилизацип давления i-аза в трубопроводе, схема которой изображена tra рис. 6.27. В данном случае са.м объект (трубопровод) является звеном с распределенными параметрами. Для простоты будем считать его прямолинейным, а всех потребителей - сосредогочсрщыми па конце трубопровода. Управляющее устройство состоит из чувствительного элемента 2 (мембранный измеритель давления), усилителей Зп4 (струящая трубка и пневматический двигатель) с жесткой обратной связью 5 и из управляющего органа 6 (клапан), Воз.муща-ющее во.здействие f{t) на объект выражается в изменении но произволу потребителей некоторого эквивалентпоге) выход1гого сечения на ко1гце трубопровода. Уравнение управляемого объекта. Движение газа в трубопроводе подчиняется уравнению dw dw 1 dp - + w------. dt dl p dl Учтем также условия постоянства массы Эр dw Эр -+ р--I- ;-= 0 dt dl dl и адиабатическое уравнение состояния газа .,0 (6.49) (6.50) (6.51) В этих уравне1Шях w, р, р - соответственно скорость, давление и плотность газа в текущем сечении трубопровода с координатой / в момент времени г (вся длина трубопровода обозначается через L); k - показатель степени в уравнении адиабатичес- кого состояния газа; индексы О вверху (р , р ) означают, что данные величины отно сятся к установившемуся состоянию системы.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||