
|
|
|
Главная -> Повышение запаса устойчивости где xj,х - неременные, описывающие поведение исс.тедуемой системы. В э.чектронной моде.ти должна быть реализоватга совокупность ди<})ференциаль-пых уравнений аиатогичггого вида: 1Щ clXj ?/2, г/т (7.46) где Х - машинные иеремепные (обычно напряжения), соответствующие ис- следуемым переменным х х ; от,- = Х,/х; - масштабные ко:-к})фнпие11ты, связыва-юнще исследуемые перемешгые с соответствующими им машинными неременнылн!, т, = i/t -- .мас1птаб времени, связываюпин! пстинное время протекания процессов t с времене.м протекания процессов в модели т. За.метим, что из.мененпе скорости протекания процессов во;)мож1ГО го.тько п[)и полном моделировании всей системы. При моделировании только части системы и сопряжении ее с реальной аппаратурой необходимо вынолпение равенства т = /., т. е. ?77, = 1. При выборе .масштаба времени должно учитываться то обстоятельство, что элек-т])онпые модели могут точно работать при ограпичшпюм времени протекания моделируемого П[юцесса. Это время не должрго обычно превышать нескольких сотен секунд, что связано с особетюстя.ми работы :)лектрониых интеграторов. Масштабные коэффициенты ОТ; должны выбираться таким образом, чтобы в переходных процессах макси.ма-чьное значение магпинной перемеииой] X,- \ = т,.Х: , .,J не превосходило предельного допустимого значения. Суп1,ествуетлве раз1ювидпости эле1арощ1ЫХ кюделируюнптх манит: моде;п1 струк-туртюго типа и .модели .матричного типа. Первые позволяют моделировать структурную схему систе.мы, что во многих случаях оказывается более удобт>1.м и наглядпы.м. Модели матричного типа требуют записи дифференциальных уравнешп! исследуемой систе.мы в особой, матричной форме. Матричные модели менее удобны для исследования систе.м и потому исноль.зуются реже. Остановимся вначале па п.меющих наибольшее применение моделях структурного тина. Они построены на базе так на;шваемых операциоппых усилтхлей, \ш-полняющпх операции интегрировапня, суммирования и умноже1ГИя иа постоя1ИН)1Й .мтюжитель. Операгпто1И1ЫЙ усилитель представляет ct)6on усил итель ностояшюго тока с боль-1НИМ ко.эффицие1ггом усиления по нап[5яжснию (десятки н сотни тысяч). Динамические свойства усилителя таковы, что он может быть замкнут 10()%-ной отрнпа-тельной обратной связью через резистор или конденсатор без потери уст011ЧИВосги (без генерации) в замкнутом состоянии. Передаточная с}ункция усилителя, замкнутого обратной связью (рис. 7.3) Н[)и большом коэффициенте усиления может быть достаточно точно представлена в виде ,.ых(Р) го(р) . им hip) где 2i(p) - входное сопротивление усилителя в операторной форме, Zq{p) - сопротивление в цепи обратной связи. 1 JJal 1 Г-- 1 > 1.1 мм-fe Рис. 7.3 в) R 1 XLLl -ih Рис. 7.4 Знак минус в формуле (7.47) показывает, что операцнопный усилитель инвертирует входной сигнал (.меняет его знак). Современные усилители обгячно и.меют как ипвертируюпп1Й, так и иеинвертирующий входы. Рассмотри.м три основных режи.ма работы усилителя. 1. При Zq(p) = /?о и г,(р) = /?, усилитель выполняет функцию умножения входной величины на постояппг>1Й множитель (рис. 7.4, а): (7.48) Упрощенное изображение такого усилителя нсжазапо па рис. 7.4, а справа. 2. При Zq(p) = 1 /рС, что соответствует установке в цепи обратной связи конденсатора, и 2, (р) = /? усилитель работает в режиме интегрирования входной величины (рис. 7.4, бу. и..Лр) = -им = --иМ- кСр р (7.49) Два варианта упрощенного изображения такого усил1гтеля изображегил на рис. 7.4, б справа. 3. При 2о=7? и 2(р) =1/рС, что соответствует установке конденсатора во входной цени, усилитель работает в режи.ме дифференцирования (рис. 7.4, в): - -RCpUM = -k.pUM- (7.50) Упроп1енное изображение такого усилителя показано па рис. 7.4, в справа. Режим дифференцирования обычно не используют при моделировании, так как в этом режиме сильно возрастает- влияние высокочастотных по.мех и паводок. На рис. 7.,5 изображен операционный усилитель в режи.ме сум.мирования. Как нетрудно показать, при Zq(j)) = R(, fBb,x(P) = --Z-Б- (7.51) 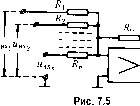 При 2о(р) = 1/рС, получаем суммирующий интегрирующий усилитель. В табл. 7.3 приведены типичные случаи использования операционного усилителя для получения различных динамических звеньев. В таблице использован машинный оператор дифференцирования dl dt nil (7.52) При моделировании в натуральном масштабе вре.мени т = г и Р = р. Электронная модель структурного типа имеет в свое.м составе несколько операционных усилителей, которые могут работать в режиме интегрирования, т. е. с конденсатором в цепи обратной связи. Число этих усилителей опреде.тяет наивысший Таблица 7.3. Типовые динамические звенья электронных моделей Схема HH=i-1 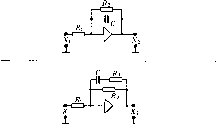 Передаточная функция W(P) = -~, T=RC W(P) = - \ + TP k = , T = R2C W{P) = -k 1+Г1Р k = -, T,=R.,C, 72=( 2+ 3)C W{P) = - Ti=R,C, Г2= 2С
|