
|
|
|
Главная -> Повышение запаса устойчивости Часть л. а. х., лежащая правее частоты среза, может иметь, вообще говоря, произвольный вид, определяемый имеющимися в системе звеньями. Однако в соответствии с изложенным выще необходимо выполнение следующих условий. 1. Высокочастотная часть л. а. х. пе до.лжпа заходить в запретную область, образованную асимптотой с единичным наклоном, пересекающей ось пуля децибел в точке (й = (Огр, и горизонтальной прямой, соответствуюн1ей L((o) = 201g. (12.106) М + \ 2. Сумма постоянных вре.мени и коэффициентов ири операторе в первой степени передаточных функций колебательных звеньев пе до.тжпа превышать значения (12.82): При построении желаемой л. а. х. в высокочастотной области вначале можно ориентироваться иа наиболее простой ее вид и сфор.мулировать ее при помощи одной асимптоты с наклоном -40 дБ/дек, положение которой определяется постоянной вре.мени 1 М 1 уМ(М-1) w,p М -ь 1 о Л/ +1 Эта л. а. x. показана в высокочастотной части на рис. 12.21 пунктирной линией. Она соответствует типу 2-1-2. При дальнейшем расчете вид высокочастотной части л. а. x. может уточняться. Однако два сформулированных выше условия пе должны нарушаться. В окончательном виде высокочастотная часть л. а. х. .может иметь произвольный вид, например пока:!анпый силопиюй линией па рис. 12.21. В следяпшх систе.мах с астатиз.мо.м первого порядка необходимо вначале проверить возможность сведения желаемой л. а. х. к типу 1 -2 или ее модификациям 1 - 2-3... Для этого необходимо исследовать возможность доведения суммы всех постоянных времени до значения, определяемого формулой (12.92): -г т -г 1 м2+Мл/м2-1 ,..,оч Ti-f/+r-j+...<------ (М<1,3). Лд 2 При отрицательном ответе необходимо сформировать переход оси нуля децибел асимптотой с едииичиы.м наклоном так, как показано па рис. 12.22. Весь расчет ведется аиа.,тогично и;зложенпому выше для стедящих систем с астатизмо.м второго порядка. Исходные данные для расчета - базовая частота Wq, и постоянная вре.мени 1\ - известны по построению низкочастотной части л. а. х. (см. рис. 12.22). Для статических систе.м расчет ведется аналогично расчету систем с астатизмом первого порядка. Вначале пеобходи.мо проверить воз.можпость использования л. а. х. типа 0-1-2 (рис. 12.17) пли ее модификации 0-1-2-3... по формуле (12.100). При Глава 13 СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ §13.1. Основные понятия Системами с переменными параметрами называются систе.мы, движение которых описывается линейными диффсрещшальпыми уравнениями с переменными во времени коэффициентами: o(0-... + -i(0+ (0==Ao(0+... + Vi(0 + *.(0/(0. (13.1) отрицательном ответе, необходимо сформировать переход оси нуля децибел ана.1о-гично рис. 12.21 и Р.22. Расчет корректирующих (демпфирующих) средств. По наиболее простой схеме расчета корректируюпию средства определяются сравнением желаемой передаточной функции с передаточной функцией системы без корректирующих средств или сравнением л. а. х., соответствующих этим нередаточиы.м функциям. Часто эта схема расчета оказывается слишком упрощенной, что затрудняет ее использование. Это объясняется главным образом трудностью пеносредствепного перехода в сложных случаях от имеющейся передаточной функции к желаемой, а также тем обстоятельством, что формирование высокочастотной части л. а. х. может быть выполнено .многозначно. Если вид желаемой л. а. х. в низкочастотной части является вполне определенным, то для ее высокочастотной части могут быть сформулированы лишь общие требования в отношении допустимой суммы постоянных времени и отсутствия пиков, заходящих в запретную зону (см. рис. 12.21). Поэтому более гибкой оказывается схема расчета, при которой построение желаемой л. а. x. и расчет корректирующих средств, обеспечивающих получепие жела-слгой л. а. x., делаются в два .этана. На первом этапе расчета на основании требований к точности строится желаемая л. а. x. и рассчитываются корректируюпще средства, формирующие ее в низкочастотной части. При этом будет получена некоторая промежуточная система, имеющая требуемую точность, но не имеющая, воз.можно, требуемого запаса устойчивости. В некоторых случаях возможно сформирование одновременно с низкочастотной частью л. а. х. ее средне-, а в простейших случаях и высокочастотной частей. На втором этапе расчета уточняется вид и рассчитываются пара.метры корректирующих средств, фор.мируюших средне- и высокочастотную части л. а. х. В результате должна быть получена система, обеспечивающая не только требуемую точность в типовых режимах, по и имеющая необходимый запас устойчивости. Методы решения задачи оптимального синтеза будут рассмотрены в гл. 23. 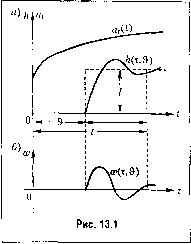 Коэффициенты а,а и Ь,являются функциями времени, которые задаются либо графиками, построенными на основании эксперимента, либо аналитически. Переменные коэффициенты в уравнении системы автоматического управления (13.1) возникают вследствие наличия пере.мепиых коэффициентов хотя бы в одном звене системы. Так, например, у подвижного объекта (корабля, самолета, ракеты) с течением времени вследствие выгорания топлива происходит измснсчшс массы и моментов инерции. Если объект при своем движении меняет скорость и высоту, то возможно из.ме-нение его аэродинамических коэффициентов. В отличие от линейных систем с постоянными параметрами, .методы анализа и синтеза которых были рассмотрены в предыдущих главах, исследование линейных систе.у1 с неременными параметрами представляет собой очень сложную задачу. В первую очередь это свя.запо с тем, что в общем случае найти решение уравнения (13.1) невозможно. В результате, как правило, неприменимы разработанные для линейных систем с постоянными параметрами критерии устойчивости, оценки качества установившихся и переходных процессов, методы синтеза и др., а существующие специфические методы анализа и синтеза систем с нере.мепными пара.мстра.ми во .хпюгих случаях оказываются сложны.ми для практического приме]1ения. В связи с этим в данной главе рассматриваются лишь особенности систем с переменными параметрами и намечаются некоторые методы их исследования. Более подробно такие системы исследуются в работах [25, 86, 89] и др. Рассмотрим переходную функцию и функцию веса системы с нере.мепными параметрами. Так как коэффициенты уравнения (13.1) меняются с течением времени, то зти функции будут зависеть от мо.меита приложения единичного скачка или единичного импульса па входе. На рис. 13.1, а изображен график изменения одного из ко,эффициентов уравнения (13.1) и переходная функция h(t-b,b)h(x, Ь), (13.2) где t - текущее вре.мя, отсчитываемое от некоторого .момента, соответствующего, например, включению системы или началу изменения переменных параметров; i& -время, соответствуюпюе поступлению на вход единичной ступенчатой функции; т - текущее время, отсчитываемое от момента приложения ступенчатой функции. Если теперь на вход подать единичную и.мпульсную функцию, которую .мож1ю Представить как предел отношения 5(,-в)= Иш 1(-)-1[-(+Ае)]
|