
|
|
|
Главная -> Повышение запаса устойчивости При этом из (19,62) находим; а, = а = 1 r;v,+i 2 s2 (19.64) (19.65) причем изменяются, конечно, и формулы для ж , и со (их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний опшбки й, .можно сделать весь.ма малой. § 19.2. Прохождение медленно меняющихся сигналов в автоколебательных системах Рассмотри.м очень важный для практики случай, Koriia внеипгее во;действие/(t), которое может быть либо возмуииющим, либо управляющим (задаюпшм), в автоколебательной системе является не постоянным, а медленно .меняюпщмся. Медленно меняюнюйся будем называть такую функцию времени, которая сравнительно мало изменяется за пе1)Иод автоколебаний, т. е, соблюдается условие в виде одного из неравенств /(+Г)-/(о /(0 T f(t.) где Т = -, а со - частота автоколебаний, со Соответственно для астатических систем медленно меняющейся скоростью / (О будет такая, для которой выполняется устовие /\t+T)-f(t) fXt) T f{t) Указанными свойствами почти всегда обладают полезные сигналы управления, проходящие через автоматическую автоколебательную систему (в том числе в переходных процессах). Условие медленного измепет1Я любой функции вре.мени можно выразить также и в частотной форме, а имен1ю: .медленно меняющейся считается такая функция, возможные частоты изменения которой во времени значительно ниже возможной частоты возникаюп1его в системе периодического решения (авгоко.юбаиий). Сделанные предположения позволят величину / {I) или, ссютветствепио, pf {t) считать постоянной :sa вре.мя каждого периода исследуемых автоколебаний и искать решение в той же форме (19.4): л- = д- -н.г*, x* = asm(uf. Q(p)(x4x*)-bft(p) F+qx*+px*\ = S{p)f{t). со j При достаточно медленном изменении функции/(t) (а в астатических сисггемах pf) и величии х , а, со, входящих в коэ(})фициенты i, q, q, данное уравнение .может быть ра.зд€лено на два отдельных уравнения: Q(p)x4ft(p)f=5(p)/(0, (19.66) Q{p)x*+R{piq + p\x*Q, (19.67) соответственно для .медленно .меняюи1ейся составляющей и для колебательной состав-ляюн1ей. При это.м ра.зделепии уравпештй, как и прежде, сохраняются существенно нелинейные свойства систе.мы. Следовательно, здесь сохраняется целиком прежний (§ 19.1) первый метод решения задачи (второй здесь неприемлем), выраженный формула.ми (19.10) - (19.1,3), где в данном случае х** является величиной не постоянной, а медленно меняющейся. Поэтому прежний процесс решения заканчивается определением функции смещения (19.13). Подставив (19.13) в (19.66), получим дифференциальное уравнение для онре-делепия .медленно меняющегося сигнала управления х {t) (на с})оне автоколебаний системы) в виде Q(p)x4/?(p)O(x )-,9(p)/(0. (19-68) Таким образом, получается, что для определения медленно меняющихся процессов функцию смещения P-Oix) (19.69) следует подставить в уравнение автоматической системы (19,1) вместо заданной нелинейности f(x,px). Следовательно, функция смещения Ф (х ) представляет собой как бы статическую характеристику (обычно криволинейную), которая определяет зависимость .между выходной и входной величина.ми .задашюй нелинейности для ностоянных или медленно меняюн1ихся сигналов в автоколебательной системе. При любых пелипейпостях, в том числе и скачкообразных, (})упкция смешения Ф (х ) может получать при онределепных условиях вид весьма плавной кривой. Этот где t отсчитывается отдельно внутри каждого периода, ибо теперь х , й и со будут ие постоянными, а переменными во времени Г (от периода к периоду) вместе с изменением внешнего воздействия/{t). При этомх (/:) будет медленно меняюпщмся сигналом на входе нелинейнос;ти. В связи со сказанным здесь остается в силе разложение (19.5) - (19.7). Но подстановка его в заданное уравнение нелинейной автоматической системы (19.1) дает 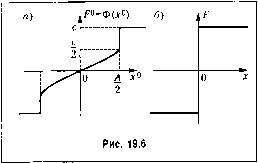 эффект называется вибрационным сглаживанием нелинейностей при помощи автоколебаний, а функцию смещения Ф (.г ) можно называть сглаженной нелинейной характеристикой. Так, в при.мере § 19.1 согласно (19.40) функция смещения будет иметь вид рнс. 19.6, а, т. е. для .медленно .меняющегося сигнала в даппой релейной системе нелинейная характеристика будет в определенных пределах иметь плавный вид (рис. 19.6, а) вместо скачкообразного (рис. 19.6, б) - за счет сглаживающего влияния автоколебательных вибраций. Далее, например, для нелинейностей, обусловленных зоной нечувствительпости (рис. 19.7, а), а также зазоро.м (рис. 19.7, б) и петлей, сигналы х < h при отсутствии автоколебаний ие передаются (F= 0). При наличии же автоколебаний сигиа.! < h передается в виде составляюп1ей Поэтому для медленно меняюн1егося сигнала получается плавная характеристика (функция смещения) Ф (х ) без зоны нечувствительности (рис. 19.7, б). Эффект вибрациощюго сглаживания нелинейностей в этих примерах является положительны.м (ликвидация зон нечувствительпости и петель). Однако в других случаях эффект вибрационного сглаживания нелинейности может оказаться и отрицательным. Возьме.м, например, нелинейную характеристику с зоной насыщения (ограниченно-линейную), показанную на рис. 19.8. В этом случае за счет того, что верхущки сшгзсонды с одной стороны срезаются, постоянная составляющая 7 будет меньще, чем са.мо значение f, соответствующее линейному начальному участку. Поэтому постоянный или .медленно меняющийся сигнал будет при наличии автоколебаний проходить через да1П1ую нелинейность с меныпи.м коэффициентом усиления, чем без автоколебаний, что может в известных случаях отрицательно сказаться па качестве автоматической системы в цею.м. v=cor 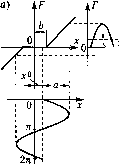 -г - 2п б) рч = Ф(хО) arctgfeii I О 0 \ 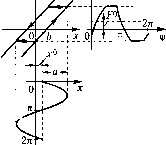
|