
|
|
|
Главная -> Повышение запаса устойчивости 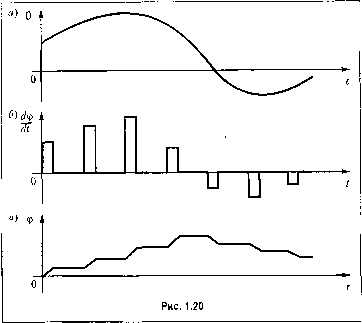 убывание скорости dip/d[ будет происходить не мгновенно, как на рис. 1.20. б, а по некоторой кривой (рис. 1.21, а). Поэтому регулирующее воздействие ф(/:) па объект будет иметь несколько сглаженный вид (рис. 1.21,6). Отсюда видно, что необходимо разумно выбирать величины периода диск[)етпости 7 и длительности X и.м пульсов. Устройство, преобразующее непрерывную входную величину в дискретную, т. с: в последовател ьиость и.мпульсов, называется икгпульсным элементом, или имиу.мьспы.м модулятором, а сам процесс преобразования - и.мнульспой модзляцией. В современных системах автоматического управления используются амплитудно-импульсная, ншротно-и.мнульсная и (гораздо реже) частотно-импульсная .модуляция. При а.мплитудно-импульспой модуляции с изменением входной величины изменяется амплитуда и.мпульсов (рис. 1.19), а их длительность х и период дискретности 7остаются постоянными. При щиротпо-импульспой .модуляции с изменением входной величины из.мепяется длительность (нтрипа) импульсов, а их а.мплитуда и период дискретности Т остаются постоянными (рие 1.22), П[)и частотно-и.мнульспой модуляции с изменением входной величины изменяется частота следования импульсов, а их а.мплитуда и длительность остаются ностоя1ты-ми. Первые в истории техники импульсные элементы были элект- 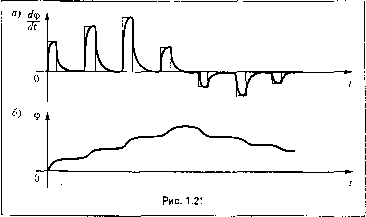 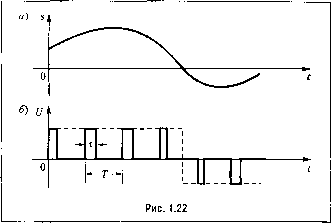 ромеханическп.ми (см. рис. 1.18). Основной смысл их введения в автоматические системы состоял в освобождении измерительного устройства от нагрузки на его выходе. В современных автоматических системах преимущественно используются электронные и микро-электроиные .модуляторы. Они ншроко при.мепяются для управления электрическими двигателями и приводами летательных аппаратов, для стабилизации напряжения в электрических сетях и в ряде других случаев. На рис. 1.23, а в качестве ириме])а изображена схема импульсного стабилизато1)а напряжения. Напряжение первичного источника эпе]лии (например, аккумуляторной или солиеч]П)й батареи) (/ Г1[)еобразуется ключевым элементом КЭ в последовательность .моду.чировапиых по njnpnne илп1ульсов f/j (рис. 1.23; б). Из.мепеиие времени за.мкиутого состояния ключевого элехкчгга и тем салиям ширины и.мпульсов т осуп1ествляется схемой управления, состоящей из пифотпо-и.мнульспого .модулятора (ШИ М) и сравнивающего устройства. Последнее срав1и-1вает фактическое значение сглажошого с)ильтро.м Ф напряжения па нагрузке f/ (уиравляе.мая величина) с эталонным зпачепие.м (/., (задаюп1ее воздействие) и определяет ошибку А(/ = (/., - У . Если А7 > О, то пшрипа импульсов па выходе ШИМ увеличивается, в результате чего увеличивается вре.мя замкнутого состояния ключевого .элемента и тем са.мы.м длитеилюсти пмпу.тьсов т. При At/ < О длителыюсть импульсов т, наоборот, у.мепь-шается. В качестве к.тючевого элемента может быть использован, паири.мер, силовой транзистор. В отличие от стабилизаторов папряже1П1я непрерывного действия, в которых весь избыток энергии преврап[ается в теило, .здесь от первичного источника отбирается столько энергии, сколько необходимо потребителю. Поэтому и коэффициент полезного действия у и.мпульсных стабилизаторов значительно выше. 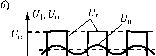 Измерительное устройство Цифровое вычислительное устройство Усилите;1Ьно-преобразо-ватслыюс устройство Управляемый объект ИСП0Л1Н1- тельнос устройство Рис. 1.24 При широтно-импульсном управлении скоростью вранюиия электрического двигателя не только эконо.мнтся энергия, но и обеспечивается плавность хода на малых (так называемых ползучих ) скоростях. Это объясняется следующим. При непрерывном унравлепии для обеспечения .малой скорости на двигатель необходимо подавать небольшое напряжение, сопостави.мое с напряжением трогания двщ-ателя. Поэтому врашепие происходит рывка.мн. При нпгротпо-и.мпульсиом управле1ИИ1 па дви-гате;п1 подается максимальное напряжение, но в течение небольшого промежутка вре,\гепи т. В разделе П1 будет показано, что нтротпо-нмпульсиый .модулятор в отличие от амплитудно-импульсного модулятора является пелинеЙ1И)1М звеном. Поэтому и с;ис-тема с широтно-имиульсной модуляцией становится нелинейной дискретной. К дискретны.м системам относятся и системы автоматического управления в тех случаях, когда в замкнутый контур систе.мы включается цифровое вычислительное устройство. Это устройство бывает иeoбxoдиro в тех случаях, когда, например, из-.мерительпые приборы в системе управ.;1еи!1я не моГут измерить иепосредствеино отклонение управляемой величины от требуемого (программного) значения, а оно должно вычисляты:я по определенным фор.мулам через показания измерптелып)1х приборов. В других случаях 1шфровое устройство .может служить для вычисления не только отклоиештя, но и самого нрогра.ммного значения управляемой величины, по каким--чибо критериям наилучшею качества работы данной системы, а также для формировать алгоритма управления. Цифровое устройство может выполнять и другие весьма разнообразные функции. Система управления в этих случаях будет работат!) как дискретная, потому что цифровое устройство вььаает результат вычисления дискретно, т. е. через некоторые промежутки времени, необходимы > для производства вычисления. Включение цифрового пычис.;лте.!1ьного устройства в контур системы уп[)авле-ппя сопряжено с п1)еобразовапием непрерывных величин в цифровой код на входе и с обратным преобразовапне.м па выходе (рис. 1,24). При этом выходная величина из-за удобства технической реализацни обычно (})01)мируется в виде последовательности импульсов, модулироватпилх iro амплитуде НЛП по ширине.
|