
|
|
|
Главная -> Повышение запаса устойчивости кой. При больших модулях вследствие увеличения крутизны чувствительного элемента может быть нарушена устойчивость следящей системьг В связи с этим в схему построения вектора (рис. 25.9) вводится специальное корректирующее устройство, осуществляющее авто.матическое изменение коэффициента усиления одного из каскадов усилителя АРУ. Работа схемы ЛРУ п1юис.ходит в функции модуля строящегося вектора. Для этой цели может использоваться напряжение Mj квадратурной обмотки ротора СКВТ. ЛРУосуп1ествляется обратно иа каком-либо нелинейном элементе (полупроводниковом диоде, полупроводниковом триоде, дросселе насыщения и т. д.). ЛРУ должно работать так, чтобы при увеличении напряжения М2 и соответственно при увеличении крутизны чувствительного элемента 3 коэффициент усиления усилителя ky уменьшался ио гиперболической зависи.мости. Тогда их произведение будет оставаться постоянным (k.ky = const), что обеспечит работу следящей системы при постоянном ко-.эффициенте усиления разомкнутой цепи. Системы с замкнутыми цспя.ми самонастройки. Рассмотри.м два принципа построения систе.м с.за.мкпутыми цспя.ми самонастройки. На рис. 25.10 изображена схема системы со стабилизацией качества процесса управления посредством связей с эталонным фильтром. и 12 представляют собой передаточные функции двух звеньев системы. Внешние условия во.здействуют па передаточную функцию 12- В качестве эталона используется некоторое звено (фильтр), передаточная функция которого Фц равна желаемой передаточной функции замкнутой системы. Выходная величина .г/ системы сравнивается с выходной величиной эталона. Разность этих величин после прохождения усилителя с коэффициенто.м усиления k поступает на вход второго звена. Результирующая передаточная функция за.мкнутой системы с дополнительной связью от эталонного фильтра будет (25.29) Если коэффициент усиления усилителя k велик, то можно положить Ф Фо. Таким образом, при изменении внешних условий передаточная функция за.мкнутой системы оказывается близкой к эталонной. Такие системы обладают (Сравнительно низкими качества.ми вследствие невозможности практически реализовать значительное увеличение коэ(})фициепта усиления k г/о. Вычислительное устройство n:i-:ia потери устойчивости. Поэтому большее практическое значение имеет другая схема самонастройки, и.зображеииая нарис. 25.11. Эта схема содержит вычисл1ггель-ное устройство дискретного или непрерывного типа, которое онре.теляет отклонение характеристик замкнутой системы от желаемых или эталонных и в соответствии с имеюши.мся отклонением воздействует на различные параметры корректирующего устройства с передаточной функцией 1,. Один из возможных путей заключается в определении вычислительным устрой-ство.м частотных характеристик систем. Для этой цели на вход системы подаются ма-.чые колебания некоторых фиксированных частот, для которых онределяется частотная передаточная функция систе.мы. В некоторых случаях нет нужды специальпо подавать на входе колебания фиксированных частот, так как они могут присутствовать во входном сигнале. Задача тогда будет заключаться тол ько в выделении этих колебаний из выходной величины посредством узкополосных фильтров. После нахождения частотной передаточной функции системы вычислительное устройство определяет требуемые зиачеиия параметров корректирующего устройства и посредством исполнительных устройств устанавливает эти значения параметров. В результате характеристики замкнутой систе.мы будут непрерывно корректи1)оваться так, чтобы реализовать приближение их к желаемому виду. Возможно также определение переходной пли весовой фупкцрш систе.мы при подаче па вход ступенчатого или импульсного воздействия и реализация воздействия па корректирующее уст1)ойство при на.чичии отклонения от желаемого вида переходного процесса. Основной трудностью здесь является недонусти.мость подачи иа вход значите.чь-ных пробных воздействий, так как они .могут нарушать основной иропесс управления. Подачаже .малых пробных воздействий .затрудняет выделение получающейся реакпии на фоне помех и шумов. Для контроля динамических характеристик возможно применение статистических методов. Пусть на входе системы действует случайный сигнал g(r), вызывающий на ее выходе реакцию у(1). Тогда взаимная коррелящюипая функция для этих двух функций времени может быть определена по выражению оо оо Rgy () = e{t-x) у{1) = j г0(л) Н((-т)с1ц = j и{ц)К (X - Л) Л. (25.30) где w(t) - функция веса системы. Ес.ти нри по.мощи корре.тяторов определить корреляционные функции Rgi) и Rgy (х), то решепие интегрального уравнения (25.30) дает весовую фупкпию. Эта задача возлагается на вычислительное устройство (рпс. 25.11). Указанный .метода наиболее прост, когда в пределах полосы пропускания системы g(t) имеет белый спектр. Тогда КАх-ц) = а8(1-ц) и Rgy(x) = aw(T). При статистическом методе опредемения весовой функции возможно использование и.меющихся во входно.м си1-пале шумовых помех в качестве npo6jfbix сигналов, что является достоинством этого метода. 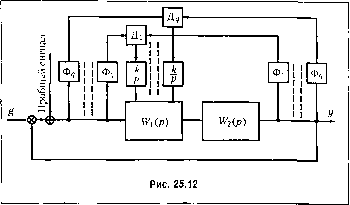 Кро.ме обычных критериев качества, самонастраивающиеся системы характеризуются временем и точностью самонастройки. Гак как объект управления в самошстра-ивающейся системе, как правило,имеет переменные параметры, то определение динамических свойств систе.мы по временным или частотным характеристикам до.1ЖИо производиться возможно более быстро, чтобы .можно б1>1Л0 выявить свойства объекта в текущий момент времени. С другой стороны, все указанные выше методы требуют некоторого конечного времени, определяемого необходимостью накопления сигна.-10в на фоне щу.чюв. Так, папри.мер, при корреляционном .методе время са.мопастройки обычно значительно превышает В1)емя иереходпого процесса, определяемое по затуханию весовой функции (25.30). На рис. 25.12 в качестве примера изображена схе.ма самонастраивающейся системы с определением амплитудно-частот1П)1х характеристик. Работа схемы происходит следующи.м образом. На вход системы поступает пробный сигнал, содержащий фиксированные частоты О) ..., со,. Эти частоты иа входе и выходе системы выдечяются узкополосны.ми фильтрами Ф, азатем в делительных устройствах Д происходит деление выходной амплитуды па входную. Это дает фиксированные точки а. ч. х. (или л. а. X.) на пробных частотах О) ..., ш,. В случае отклонения частотной характеристики от заданного значения сигнал с выхода делительного устройства поступает через усилитель на исполнительный элемент, представляюпи-1Й собой интегратор, который воздействует па корректирую nice устройство с целью восстацовлепиятрсбус\К)ГО значения .модуля частотной передаточной функции на данной частоте. Нетрудно видеть, что процесс самонастройки в .этой системе в некотором роде подобен автоматгшсско.му синтезу системы управления по ее частотным характеристикам. Число дискретных частот пробного С1н-нала определяется сложностью объекта. Оно совпадает с число.м опорных точек логарифмической ахшлитудной характеристики, которое надо иметь, чтобы осуществить синтез системы по методу л. а. х. Таким образом, са.моиастраивающисся системы этого типа (рис. 25.11) представляют собой, по cyniccTBv, устройства авто.матического синтеза систем управления по заданным качественным показателям. Систе.мы с экстремальной самонастройкой. Эти системы отличаются от рассмотренных выше систем с замкнуты.\щ цепями самонастройки тем, что в них автоматически осуществляется опти.мальный синтез системы. Ст1)уктурпая схема в этом случае совпадает со схемой, изображенной на рис. 25.11. Для реализации опти.малыюго синтеза в основу работы вычислительного устройства должен быть положен некоторый критерий опти.мальности. При расчете систе.м
|