
|
|
|
Главная -> Повышение запаса устойчивости У2=к dyj dF (25.13) где A ~ некоторый коэффициент пропорциопальности. Заметим, что для получения правильного направления движения должно быть А > О для случая экстремума-максимума и < О для экстрему.ма-минимума. Отсюда следует, что, задавая поочередно скорости изменения г/ ..., у и измеряя (IF производную по времени , можно найти составляюнше градиента (25.3). Некоторым недостатком этого .метода является необходимость диффере1пп1ровапия функции Т-по вре.мени, что сопровождается гюднятием уровня высокочастотных помех. Способ запоминания экстремума. Этот способ заключается в том, что систе.ма совершает вынужденное или автоколебательное движение в районе экст[)е.мума. При достижении экстре.мальиого значения F= оно фиксируется на запоминающем устройстве. Градиент функции онределяется зате.м по разности текуп1его и экстремального значений f- Обратимся теперь к организации движения по направлению к экстрему.му. Рассмотрим несколько возможных способов. Способ Гаусса-Зайделя. Способ заключается в поочередном изменении координат z/j.....у . Сначала фиксируются все координаты z/j.....у, а координата у, и.змепя- ется так, чтобы обратилась в пуль соответствующая с:оставляющая градиента . Затем изменяется координата г/2 нри фиксированных остачыиях координатах до обрап[е-clF ния в пуль и т. д. После изменения координаты у обран1аются опять к г/, и далее повторяют весь цикл снова. Этот процесс продолжают до тех пор, пока пе будет достигнута точка экстремума F. Этот способ не обеспечивает быстрейшего достижения точки экстремума вследствие того, что координаты изменяются не все сразу а поочередно. Способ градиента. В этом способе осун1ествляется одповре.мен1Ю изменение всех координат так, чтобы обеспечить движение системы в направлении, близком к мгновенному направлению вектора градиента (непрерывно или дискретно). В простейпгем случае непрерывного безынерциошюго управления для .этого должны реали.зовываться зависимости . , dF Траектория днижепия и.зображающей точки г/ . . ., у в это.м случае оказывается нормальной киоверхиости/-(г/,.....у ) = con.st. Уравнепия (25.13) соответствуют устойчивому движению экстрема.чьпой систе.мы, гак как из (25.12) следует + ...+ [dy (25,14) Следовательно, производная функции Fuo времени сохраняет свой знак (больше нуля при > О и меньше нуля при < 0) повсюду, кроме точки экстремума, где эта производная обращается в нуль, что соответствует моиотокпо.му сходящемуся процессу При шаговом движении реализуются зависимости Аг/, =k Уп=к dy\ dF (25.15) где Дг/ ..., Ay - фиксированные шаги в направлении экстрему.ма. Д.;1Я способа градиента характерно плавное движение по направлению к точке экстрему.ма и малый размах колебаний около точки экстремума при шаговом движении. Способ наискорейшего спуска. Приспособе наискорейшего спуска движение происходит но начальпо.му направлению вектора градиента f до тех пор, пока производная функции Fho этому направлению не обратится в нуль. Затем опять определяется направление градиента и происходит движение вдоль этого вектора до обращения в нуль f(j/b№)=const У2 1 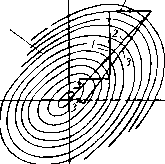 L и (а)-[13-г производной от Fno этому направлению. Пропесс повторяется до достижения точки экстремума. Этот способ характеризуется быстрым выходом системы в район экстремума, что делает его предпочтительным для начальной стадии движения. В районе экст[)ему.ма .можно использовать другие способы, например, способ градиента. На рис. 25.2. для случая двух управляемых величин, что соответствует F = 7(г/ у ), изображены траектории движения для рассмотренных вьппе способов поиска экстремума [44]. Кривая 1 соответствует способу Гаусса-Зайделя, кривая 2 - способу градиента и кривая 3 - способу наискорейшего спуска. Рассмотри.м теперь пример экстремальной системы для наиболее простого случая, когда 7 = F(y). П р и м е р. На рис 25.3 изображена схема экстремального управления настройкой колебательного контура. Полезный сигиат с частотой/поступает на параллельный резо1гансный контур, состоящий из катушки L и конденсаторов перемеппой емкости С, и С,. Конденсатор С., имеет сравнительно небольшую емкость. Ротор его вращается двигателем Д2 с постоянной скоростью, вызывая периодические изменения общей емкости контура, которая является управляемой величиной. Оби.1ая емкость колебательного контура С = С, +С2 =С, +С20 -ьЛ, sincOt, где С20 - постоянная составляющая емкости конденсатора С2, асо, - угловая скорость вращения его ротора. Частота о), выбирается так, чтобы она была во много раз меньше частоты полезного сигнала о) = 2nf и больше возможной частоты процесса управления. Двигатель Д2 синхронно с вращением ротора конденсатора С2 дает опорную величину в синхронный детектор СД, например, в виде опорного иапряжещт той же частоты от генератора ГОН. Пере.мен1юе напряжение на колебательно.м контуре после выпря.млсния и сглаживания фильтро.м Ф, поступает иа вход СД. На выходе СД фор.мируется сигнал, про- порциональпыи производной от амплитуды напряжения контура по емкости . Этот сигнал после сглаживания фильтром Ф2 поступает далее на усилитель и двигатель Д,. Последний будет вращать ротор конденсатора С т. е. изменять управляемую величину и производить подстройку контура до тех пор, пока производная не станет равной нулю. Всякое изменение частоты сигнала/будет вызывать автоматическую подстройку на максимум напряжения на контуре. В этой систе.ме поиски экстре.му.ма по способа.м Гаусса-Зайделя, градиента и паи-скорейше1-о спуска с;ли8аются в один вследствие наличия только одной управляемой величины (емкости контура). Нетрудно видеть, что в рассмотренной экстремальной системе 1юлучается своеобразная следящая система, ошибкой в которой является производная . В соответ-
|