
|
|
|
Главная -> Повышение запаса устойчивости бениост.ь, что передаточной функцией линейной части системы (см. рис. 23.2, б) будет Wiz) = W,(z)D(z). (23.7) Для получения частотной передаточной функции удобно иснолыовать псевдочастоту X (14.100) иламену (14.99). Тогда WUX) = \V,(jX)DaX) (23.8) и условие (17.86) нри.мет вид 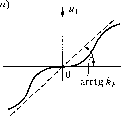
Рис. 23.4 U\X)-h,ViX) + -l->0, U(k) = \\cW{jX), V =Xr\mW{iX), (23.9) (23.10) Tq = 1 с - нормирующий .множитель, a коэффициент i/,-определяет левую границу сектора, к которому принадлежит характеристика нелинейного звена (рис, 23.4). Если коэффициент отнести к линейной части системы, то вместо (23.9) нолучим: kpU (X)-hkpV\X) + \>0. (23.11) Это означает, что для установления устойчивости системы достаточно подобрать такую прямую на нлоскости W {jX), проходящую через точку (-1;;0), чтобы вся кривая kp W iJX) = kpU (X) + jkpV (л) (23.12) лежала справа от этой прямой. Для систе.м высокого порядка значения U(X) и V(X) проще находить по известным формулам: U(X) = A(X)cos\v(X), V(X) = (A)sin i/(X), (23.13) где A(X) и Ц!(Х) - модуль и аргумент частотной нередаточной функции (23.8). В этом случае кривая kpW(jX) определяется следующим образом: kpW(jX) = kpA(X)[coii\]i(X) + jXTQsm\v{X)]. (23.14) Пример 2. Пусть передаточная функция непрерывной части системы P(TiP + l) Р Tip + l (23.1.5) персдагочггая функция дискретного корректирующего устройства D(z) 1, гюстоян-ная времени 7, = 0,2 с, период дискретности Т= 0,1 с, нелинейная характеристика релейная с зоной нечувствительности (рис. 23.4, б), с = 1, = 0,2. Отметим, что непрерывная система с передаточной функцией линейной части (23.15) и данной характеристикой нелипейпого звена устойчива, так как характеристика W (;а)) = - 1 + 7V l + r,W целиком располагается в третьем ква/.1рапте плоскости W*{jm). Этот вывод совпадает с иолучепным в § 17.1 (пример 3, рис. 17.3, е). Для исследования дискретной системы находим передаточную функцию (23.7): U() = UV) = --2-1 Z-d d = e Соответствующая ей частотная передаточная функция (23.8) 1-Ь7л(Г2-Г,)] (23.16) T\ + d Т , Т 2 = - --Г = -Ctll- 2 1-fl 2 2Г, При заданных значениях Г и Г, отношение 7У2Г значительно меньше единицы. Поэтому приближенгго можно принять 27, Г 7; =7,. Тогда выражение (23.16) упрощается: (23.17) Отсюда с учетом (23.10) и (23.12) находим: k,-V\X) = -kT, (23.19) Кривая (23.12) изображена иарис. 23.5, а. Та.м же в координатах U и Упуиктирной кривой показана АФХ приведенной линейной части системы, соответствующая (23.17), при k = kokf-OCie характеристики пересекают ось абсцисс при значении псевдочастоты (23.20) па расстоянии 7У2 от начала координат. Из рис. 23.5, а видно, что достаточное условие положения равновесия выполняется при kT< 2. За.мети.м, что в данпо.м случае оно совпадает с необходимым и достаточ-пы.м условием устойчивости замкнутой линейной дискретной системы (см. гл. 14), у которой частотная передаточная функция разомкнутой систе.мы имеет вид (23.16), а коэффициент передачи k = кф. При кТ> 2 пелипейная дискретная система может стать неустойчивой. Для подтверждения этого на рис. 23.5, б пока.зан фрагмент кривой переходного процесса, построенной аналогично тому, как .это сделано в п]5имере 1, при 7= 4,g = О и начальных условиях X (0) = 0,2; х (-1) = О, Видно, что в системе устанавливаются нериодические колебания с периодом, равпы.м 8T(N= 4), С.тедует отметить, что выполнение условия кТ< 2 ие 1-араптирует устойчивость систе.мы при наличии внешних воздействий. Метод гармонической линеаризации при его применении для исследования нелинейных дискретных систем в значительной стеиепи утрачивает свои ценные качества. Рассмотрим основы этого .метода. 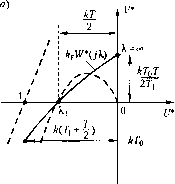 0,6 0,4 -0,2 -0,4 -0,6
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||