
|
|
|
Главная -> Повышение запаса устойчивости 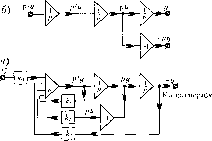 порядок дифференциального уравнения, которое может быть исследовано иа данной модели. Кроме того, имеется ряд вспомогательных усилителей, при noMonui которых можно осуществлять онеращти умножения на постоянный множитель (масштабирование), перемены знака (инвертирование) и суммирования. Исследуемые процессы в виде из.менения .машинных переменных (напряжений) могут наблюдаться и фиксироваться при помощи ос1щллографов и фа<[)ОПостроителей. Для приложения к элскгрогнюй модели исследуемой системы задающих и воз.мущающих воздействт ! исполь.зуются геие[)ато-ры, которые .могут воспроизводить требуе-.мыс фуикпии времени, например линейную функцию, синусоиду, экспоненту, пря.моу-гольную или треугольную волну и т. п., в виде соответствующего изменения электрического напряжения. Существуют также генераторы случайных величтг Кро.ме того, электронная модель имеет ряд вспо.могательных устройств, позволяющих после набора исследуемой задачи производить пуск и остановку решения дифференциальных уравнений, фиксацию решения в заданной точке, периодизацию решения и т. п. Набор задачи на электронной моде;ш структурного тина может быть осуществлен двумя способами; 1) по /шс1)<1:)еренциальному уравнению, которы.м описывается исследуемая система; 2) по структурной схеме исследуемой системы. Рассмотрим порЯдок набора задачи на простейшем примере. Начнем с первого способа. Пусть дана система, структурная схе.ма которой представлена на рис. 7.6, а. Для .этой схемы передаточная функция разомкнутой системы Рис. 7.6 Щр)=-. (7.-53) \ + 1\р pi + rp) Диффе15епциалы1ое уравнение ; мкпутой системы, записанное в символической форме, в соответствии с гл. 5 будет [1+ w(p)\y(t)- \V(p)g(t), где г/(/.) - управляемая величина ag(0 - ;!адающее воздействие. В рассматриваемом случае, учитывая (7.53), получи.м (ар + щр + a.jp + з) yit) = ag{t). (7.54) о = F{1\; а, - 1\ + Т/, a.f-\ и а.з = Перейдем к маплшиым переменным Y = т,у и G = 1Г.£. Учитывая сос)тноц1ения т = тС и = тР , получим из (7.54) дифферетцпктьпое уравнение для мапгиппых переменных: (ЛоР + А,1 + АР + А,) Y(x) ~- B,G(x), (7.55) где .% = mfoo, Ai = тщ, А = mfl Л3 Уравнение (7.55) разрешим относительно старшей производной: РуЛс-рЦ- (7.56) 4 Л А) рассмотри.м цепочку из трех последовательно включе1нн>1Х интеграторов (рис. 7.6, б). Если ГШ вход первого интегратора поступает величина PY, то па его выходе получится, сучетом 1геремены знака, величина - FY, па выходе BTopoio шггеграто-ра - величина РК и на выходе третьего интегратора - величина - К В результате можно реализовать дифференциал)>ное уравнение (7,56), если на входе первого интегратора сложить с учетолг знаков и маспггабов все члены, входяпше в правую часть формулы (7.56). Это цоказа1и) на рис. 7.6. в. 31шчения коэффштеитов делителей k -Ik k - А 4 Ai определяются выражениями ю - , > М -~Г 2 ~Т~ н ~~Г /1о Л(, Aq /1у Задавая теперь управляющее воздействие G(x) от генератора (})ункций времени и вводя начальные значения, можно исследовать поведение маши1И10Й переменной К(т), которая отображает поведение управляемой величины y(t) в реа;ияюй системе. Второй способ набора задачи пазлектрониой .модели ;!а1слючается в TONr, что восп[)о-изводится структурная схема, изображенная на рис, 7.6, а. Звено второго порядка удобнее щюдставить в виде последоватечыго вюиочеипых звеньев первого порядка, каждое из которых .может быть реа.!П1;ювано на ба,)е одного интегратора. Это представлено на рис, 7.7, а. Схема набора, пос.трое1Н1ая в соответствии с табл. 7.3, изоб{)ажена i la {жс. 7.7, б. Для уяс11еггия методики подсчета коэффициентов расемотрн.м, например, второе звено (рис. 7.7), Исходная передаточная функция имеет вид Л2(р), (7.57) х,(р) 1 + Г2Р Для маппгиных пере.мепныхХ, = тх, и 2- 2 уравнение запишется в виде Х[ т, i + T2miP От(Ж)да находим (7.58) 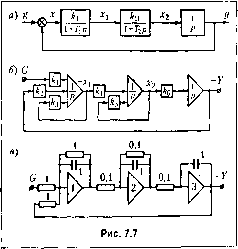 Это уравнение и набрано на втором интеграторе (рис. 7.7, б). Передаточные коэффициенты усилителя по соответствующи.м входам определяются из (7.59): (7.60) (7.61) Аналогичным образом составляется схе.ма набора остальных звеньев, входяп1Их в структурную схе.му (рис. 1.1;а). Получившаяся схема набора (рис. 7.7, б) представляет собой совокупность операционных усилителей в режиме интегрирования, за.мкнутых местными отрицательными обратны.ми связями. Другой метод структурного моделирования заключается в том, что элементы структурной схемы представляются в виде типовых звеньев, набираемых па операционных усилителях в соответствии с табл. 7.3. На рис. 7.7, в изображена подобная схема набора для случая, когда , = 1, = 10 с . Г, = 1 с и Г2 = 0,1 с. При наборе принят натуральный .масштаб времени ( т, = 1 и t = x). По сравнению с .моделированием дифференциального уравнения (рис. 7.6) моделирование структурной схе.мы и.меет преимущество в смысле большего соответствия модели исследуемой систе.ме. Кроме того, моделирование структурной схе.мы позволяет просто учитывать при исследовании системы типичные нелинейности, например ограничение переменной величины, зону нечувствительности, релейную характеристику, люфт и т. и. Эти характеристики могут быть реализованы в электронной модели посредством исиоль-;ювания диодных элементов. В табл. 7.4 приведены некоторые типичные пе.чинейности и электрон1Н)1е схе.мы с диод-ны.ми элементами, позволяющие реализовать в .модели эти характеристики. Кро.ме этих простеЙ1ПИХ пелинейных блоков в электронных .моделях применяются более сложные схемы, позволяюппге реа.ли;ю-вать различные криволинейные характеристики, операции возведения в степень н извлечения корня, операции перемножеггия двух переменных и т. п. На рис. 7.8 для иллюстрации приведена структурная g 0-
|