
|
|
|
Главная -> Повышение запаса устойчивости шее устройство, пли чувствительный элемент 2 производит вычитание = h{t) - z(t) и тем самым выявляет рассогласование, или он1ибку системы. Далее ставятся усилительно-преобразовательное 4 и исполпителыюе 5 устройства. В некоторых случаях вводится дополнительное измерительное устройство 3, а иногда и звено б, через которое осуществляется местная обратная связь. Управляющее устройство в соответствии с заложенным в него алгоритмом управления формирует управляющее воздействие u(t), иаправленпое на ликвидацию рассогласования .r(f), независимо от причины, вызвавшей это рассогласование. Наиболее распространенными задачами, которые решают системы автоматического управления, являются стабилизация, выполнение заданной программы и слежение. Системы, поддерживающие постоянное значение управляемой величины при изменяющихся возмущающих воздействиях называются стабилизирующими системами (стабилизация температуры, давления, напряжения, углового положения летательного аппарата и т. п.). Управляющее устройство таких систем Ш10гда называют регуляторо.м, а сами системы - системами автоматического регулирования. Системы, из.меняющие управляемую величину по заранее заданной программе, называются программными системами. Такая задача возникает, например, при выводе ракеты на зада1шую траекторию, при развороте зеркала телескопа с целью ко.м-ненсации вращения Земли и в других случаях. Системы, управляемая величина которых воспроизводит произвольно изменяющееся задаюнюе воздействие, называются следящими системами. Так, atrrenna радиолокатора должна следить за маневрирующей целью, фреза коиировально-фре-зерного станка должна воспроизводить движение щупа но копиру и т. д. В перечисленных выше системах требуемое значс1те управляемой величины ос-тава.-10сь постоянным, либо изменялось по определенной нрогра.м.ме, либо задавалось извне. Однако в ряде случаев сама система в процессе управления должна производить поиск такого требуемого значения, которое необходн.мо в данный .момент вре.мени выдерживать, чтобы режи.м работы управляемого объекта был наивыгоднейшим. Такие систе.мы автоматического управления называются экстремальными. Схе.ма экстремальной системы отличается от изображенной на рис. 1.3 тем, что вместо задающего устройства ставится устройство автоматического поиска, которое производит анализ какой-либо характеристики объекта и подает в управляющее устройство такое требуемое значение управляемой величины h(t), при котором данная характеристика приобретает экстремальное (максимальное или мшшмальное) значение. Очевидно, что построите экстремальной системы имеет смысл липп> при изменяющихся возмущающих воздействиях. Экстремальное управление .может применяться, нанри.мер, для поддержания наиболее экономичной скорости полета самолета, соответствующей ппимaлыoмy се-кундно.му расходу тошшва при изменяющихся высоте полета, массе самолета, скорости и направлении ветра и т. д. При .этом будет достигнута и .максимальная дальность полета при заданном запасе топлива. Управляющее устройство системы создается применительно к каждому конкретному управляемому объекту. Если свойства объекта и возмущающие воздействия хорошо известны, го .можно заранее уверешю выбирать такие структуру и пара.мет- ры управляющего устройства, при которых обеспечивается надлежащее качество процессов в проектируемой автоматической системе. Если же свойства самого объекта и.звестиы недостаточно достоверно и если к то.му же omi .могут в процессе работы в некоторых пределах случайным образом меняться, то и параметры управляюп1его устройства можно подобрать липп, ориентировочно. В этом случае при отклонении параметров объекта от расчетных будет происходить ухудшение качества процессов в системе. В тех случаях, когда закон из.менеиия пара.метров объекта во времени заранее хорошо известен, .можно рассчитать, как и когда нужно менять параметры управля-юн1его устройства, чтобы качество работы авто.матической системы в целом оставалось пеизмешю хорошим. Так делается, например, в некоторых системах управления ракетами, у которых в процессе полета из-за выгорания топлива изменяется масса, а из-за изменения плотности атмосферы - эффективность исполнительных органов. Если же составление такой програ.ммы оказывается невозможным вследствие незнания истинного закона из.менеиия хотя бы некоторых пара.метров объекта, то прибегают к построению так называемой самонастраивающейся системы. Для этого в систему вводятся дополнительные автоматические устройства, которые определяют отк;онение какого-либо показателя качества от его требуемого значения и изменяют параметры управлягоп1его устройства или даже его структуру с пелью минимизации указанного отклонения. Экстремальные и самонастраиваюпп1еся систе.мы относятся к так называемым адаптивным системам автоматического управления. Образцы для подражания дают процессы адаптации в живой природе. Так, стабилизация температуры тела человека и некоторых животных при низких те.\1перату1)ах окружающей среды осуществляется за счет изменения притока кропи к поверх110стны.м тканям, а при высоких температурах включаются .механиз.мы потоотделе1П1я и дыхания, обеспечивающие интенсивный отвод избытка тепла. Таким образом, имеет место изменение алгорит-.ма управления. Более детально адаптивные системы рассматриваются в разде;1е V. В систе.ме, схема которой изображс1Га на рис. 1.3, и.меется лишь одна управляемая величина и одно уиравляюп1ее воздействие Такие систе.мы называют одномерными. Но существуют и так называемые связанные или многомерные системы управления. Многомерны.ми называются такие систе.мы, в которых имеется несколько управляе.мых величин или в единый комплекс связаны несколько управляющих устройств па одном объекте или несколько управляющих устройств и несколько объектов с нерекрестиы.ми связя.ми между ними, . Обрати.мся. напри.мер, к системе автоматического управ.теиия полетом самолета (систе.ма самолет - автопилот). Автопилот и.меет три капала унравлотя: у11[)авле-ние движением в вертикальной плоскости (по тангажу), управление движением в горизонтальной плоскости (по курсу) и управление поворотом вокруг собственной оси (по крену). Для примера па рис. 1.4 изображен один канал автонилота - курсовой. Здесь корпус са.молета 1 является объектом управления, ги1)оскоп 2 с потенцпо-метрической схемой служит измерительным устройством. Далее идут усилитель 3, приводной двигатель 4 с редуктором 5 (рутевая машинка) и, в качестве исполнительного органа, руль 6. 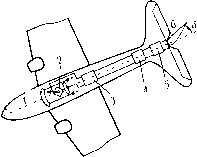 Заданное направление Рис. 1.4 Ось 1ироскопа обладает свойством сохранять неизме1нн>1М свое направление в пространстве. Поэто.му при отклонении самолета на угол \; от зада1И10го курса движок, связанный с осью, c.vleIцacтcя с нулевой точки потенциометра. В резу.штате на усилитель-преобразователь подается на-пряже1П1е, пропорциональное углу отклонения \;. Оно приводит в движение исполнительное устройство 3-5. При STo.vi вследствие отк,чонепия руля па угол 5 са-молег возвратится в требуемое положение. Аналогично устроены и два других канала автопилота. Очевидно, что если с но.мощью автопилота требуется под,держивать пеиз.менный курс или необходимо разворачивать са.молет по заданной программе, то данная система управления будет работать либо в режиме стабилизации постоянной величины, либо в режиме программного управления. Если же самолет надо наводить на какую-либо цель, причем заданное направление (рис. 1.4) вместо гироскопа (или в дополнение к не.му) определяется каким-нибудь визируюн1И.м устройством (оптическим Hjni радиолокационным), то данная система управления будет работать как следящая система. Аналогично обстоит дело и но каналу тангажа. В канале крена обычно и.меет место автоматическая стабилизация нулевого угла крена. При этом каждый из трех каналов управления действует на свой руль (руль направления, руль высоты, .элероны), т. е. имеется три отдельных управляюишх устройств на одном объекте. Однако между нилш часто вводятся еще перекрестные связи. Например, для улучи1е1И1Я поворота ca.viojicTa но курсу полезно самолет несколько накренить. Поэтому сигнал отклонения курса подается не то;1ько на руль направления, но также и в канал крепа (так называемый координированный разворот). § 1.2. Классификация автоматических систем по характеру внутренних динамических процессов Каждая автоматическая система состоит из целого ряда блоков или звеньев, различно соединенных между собой (см. рис. 1.3). Каждое отдельно взятое звено имеет вход и выход (рис. 1.5, а) в соответствии со стрелками на рис. 1.3, обозначающн.ми воздействие или передачу тформации с од11О10 звена на другое. В общем случае звено может иметь несколько входов и выходов, но сейчас это несущественно. Входная величинах] и выходная 2 .MOiyT иметь любую физическую природу (ток, напряжение, перемещение, температура, освещенность и т. п.). В процессе работы автоматической системы величины X, и Х2 из.мепяются во времени. Динамика процесса 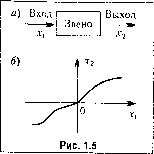
|