
|
|
|
Главная -> Повышение запаса устойчивости Важно отметить, однако, следу10Н1ее. Согласно формулам (22.21) и (22.31) величина зависит от спектральной нлотности помехи лу(ы). Поэто.му и определяемая через величину а.форма функции смещения (22,28) и крутизна ее (рис. 22,9) зависят пе только от параметров самой системы, но также и от спектральной плотности помехи .sy(c)). Но если А зависит от Sy(o)), то согласно (22.34) и (22.35) все статические и дина.мические качества и даже устойчивость системы по полезному сигна.ту будут . зависеть ие только от параметров самой системы, но и от параметров спектральной нлотности внешней случайной помехи. Следовательно, устойчивая при отсутствии помех нелинейная система может при определенном уровне помех потерять своп качества, т. е. выйти из строя как система автоматического управлепия не по причине того, что система перестает фильтровать полезный сигнал, как бывает обычно, а потому, что основной Koirryp управлс1Н1Я меняет свои дина.мические качества с изменением или даже становится неустойчивым. Возможны случаи, когда .это специфическое для пелипеЙ1П.1х систем явление будет наступать 1)аньше, чем система, рассчитанная как линейная, перестанет фильтровать полезный сигнал. С этой точки зрения учет фактически имеющихся в системе автоматического управления нелинейностей нри наличии высокочастотных (по сравнению с полезным сигналом) помех является чрезвычайно важным для практики. Это столь же важ1Ю, как и учет влияния вибрационных синусоидальных помех, рассмотренный в § 21.2. Результаты решения обеих задач аналогичны. Очевидно, что описанное специфическое для нелинейных систем влияние помех в некоторых случаях может и улучшать дина.мические качества системы. Привлекательной стороной изложенного метода является то, что исследование качеств переходных процессов, всех частотных характеристик и других качеств системы управления по полезно.му (регулярному) сигналу производится любььми методами Л!Н[еЙ1ЮЙ теории автоматического управления по уравнению (22.34). Несмотря на эту линеаризацию решепия задачи, хорошо выявляются и все важные для практики специфические нелинейные явления благодаря описанному методу определения коэффициента А , учитывающему несправедливость принципа суперпозиции для нелинейных систем. Важно иметь в виду еще следуК)П1ее. Исследуя метода.ми линейной теории управлепия но уравнению (22.34) из.менение статических и динамических качеств системы по полезному сигналу с измепение.м структуры и параметров этой системы, надо обязательно учитывать при .этом и из.меиение самого коэффициента вытекающее из выражений (22.33) и (22.31) или (22.21). § 22,3. Пример исследования влияния случайных помех на динамику нелинейной системы На нелинейную систе.му автоматического управления (рис. 22.10) действует случайная помеха/(t), являющаяся высокочастотной по сравнению с медлен 1Ю меняющимся полезным сигналом в данной системе. Проходя через нелинейное звено, помеха изменяет его коэффициент усиления по опюшепию к полезно.му сигналу (вторая .задача § 22.2), Требуется оценить влияние этого явления на дина.мические качества данной системы автоматического управления по полезно.му сигналу. /(01
Рис. 22.10 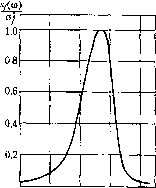 О 20 40 60 80(о(с-1) РИС. 22.11 Уравнение замкнутой системы (рис. 22.10) в целом будет p\T2P + \)x + {k2kp + kkJ,p+kks)F = kp\T,p + \)f{t), (22.36) где k = ,2 W ~~ заданная нелинейность (рис. 22.10, б). При этом заданы: к = 18, *2 = 60, = 0,03, ito = 0,5Г, = 0,5 с, Т2 = 0,02 с, = 4. Помеха имеет нормальный закон распределения и задана спектральной плотностью (рис. 22.11) 5/(ш) = 2(3aV (a)2-aV)4pV (22.37) где а = 0,05, р = 1,39 с\ cof = 7,5 с ц = 0,03 с. Меняя величину диснерсии помехи Оу-, характеризующую уровень помехи , будем определять динамические качества системы в зависимости от величины Cj. Произведя статистическую линеаризацию (22.3), разобьем уравнение систе.мы (22.36) на два, соответственно для регулярной и случайной составляющих: р (Г2Р +1) f + {kkp + kkTip + kk )F = 0; p\T2P + V)HhKP +kkTp + kk)q y =kp\T,p + \)f(t). Поскольку передаточная ({пункция линейной части системы р\Т2Р + \) (22.38) при заданных выпге ее параметрах практически не npoiiycKacT частот, при которых спектральная плотность помехи (рис. 22.11) имеет существенное значение, то согласно (22.31) дисперсия помехи на входе нелинейного звена будет Ajto+l 2PaV ((JD;-aV)+pfu .2,.,2 Trdm. Чтобы привести этот интеграл к стандартному виду (§ 11.6), преобра.зуе.м сначала зна.мепатель спектра.,чыюй нлотности, а и.менно; ((О? - аш ) +рш = а(7ш) + р;ш + а) 1огда согласно обозиачепия.м нриложепия 1 получим А Ош) - о (/t) + i Qf + 2 (/w) + з> - ,.>2 в чис.чителе же получим G (со) = 7i/ + iP = ЬьУ+Ьуш + b, 6а = В результате находим где согласно приложению 1 О, 62=1. =2(3/3, 2рш1(аЧцГ2+Г2м1) 2,..2ч- (22.39) Перейдем теперь к уравнению (22.38) для регулярной составляюп1ей, т. е. для полезного сигнала f .Функция Р определяется в не.м графиком рис. 22.6, б в .зависимости от .г, и О) . В начальной части все кривые этого графика близки к пря- мым. Поэтому можно провести их обычную линеаризацию в виде (22.41) Это омре.и-ляется путе.м простого построения а.милит.уяпой частотной характеристики лнпойпой масти систе.мы по ое перолаточпоп функции.
|
||||||||||||||||