
|
|
|
Главная -> Повышение запаса устойчивости равлением по отклопепию или ошибке, используется управление но задаюпгему или возмущаюп1ему воздействию. Таким образом, в систе.ме комбинированного управления осуществляется управление по замкнутому и разомкнутому циклам. Рассмотрим вначале случай, когда дополнительно к управлению по от1а10нениюз:() используется управление по задаюп1ему воздействию g(t). Структурная схема такой системы изображена на рис. 9.10, а. В случае отсутствия управления по задающему воздействию, т. е. при Ц)(р) = О, управляемая величина г/ связана с задающи.м воздействием g через передаточную функцию замкнутой системы:
Рис. 9.10 (9,30) где W{p) - передаточная функция [)азомкпутой системы. При введении управления позадаюп1ему воздействию управляемая величина определяется выражением l-t-M/(p) [1 + ф(Р)1Я = Фэ(Р)Я- (9.31) Эквивалентная передаточная функция замкнутой системы с учетом управления по задающему воздействию Фа(Р)= и/(р)[1 + Ф(р) 1 + И(р) (9.32) Из последнего выражения видно, в частности, что.введение управления по задающему воздействию не меняет характеристического уравнения систе.мы, работаю-и1ей ио отклонению, так как знаменатель передаточной функции замкнутой системы одинаков в (9.30) и (9.32), Это обстоятельство является замечателыпям свойством систем комбинировашюго управления. Введение дополнительного управления по задающему воздействию не меняет левой части дифференциального уравнения. Это означает, что не будут нарушаться не только условия устойчивости, но сохратштся оценки качества переходного процесса, базируюпшеся иа использовании корней характеристического уравнения. Из выражения (9.32) ио известным соотпошечия.м (5.19) и (5.26) .могут быть найдены эквивалентная (т. е. с учетом управления по задающему во.здействию) передаточная функция по ошибке и передаточная функция разомкнутой системы \-ф.Лр) 1-Ф(ртр) (9.34) Переход к эквивалентной передаточной функции разо.мкнутой систе.мы W (p) позволяет заменить структурную схему системы ко.мбинированпого управления эквивалентной ей обычной схемой системы, работающей по отклонению (рис. 9.10, б). Из формулы (9.33) для передаточной функции по ошибке можно найти условие полной инвариантности системы. Положив Ф;ХО = О, получаем ч>{р) = Wip) (9.35) Ра.зложив последнее выражение в ряд по возрастающим степеням оператора р, по;1учим необходимый вид функции, определяющей вводимый сигнал от управляющего воздействия: <КР) = а(,+\Р+4р +зР (9.36) где о - безразмерное число. Этот ряд может быть конечным и бесконечным. Первое слагаемое (9.36) в астатических системах и в большинстве статических систем (см. следующий параграф) оказывается равным нулю. Это не распространяется на случай использования комбинированного управления по возмуп1ающему во.здействию, где практически всегда получается а Ф 0. Таки.м образом, при введении управления но задающему воздействию для получения полной инвариантности необходимо вводить первую и высшие производные от задаюнюго воздействия. Обычно точно можно ввести только в некоторых случаях первую производную, а все последующие производные могут быть получены приближенно при помощи использования известных дифференцирующих звеньев (см., например, рис. 4.23 и 4.24). По.9тому практически может быть получена не полная, а частичная инвариантность. Это соответствует введению ограниченного числа первых членов разложения (9.36). Так, например, введением первой производной от задаюпюго воздействия в системе с астатизмом первого порядка можно получить равной пулю скоростную ouih6- ку, т. е. повысить степень астатизма относительно задающего воздействия па единицу. Вводя первую и вторую производные (даже приближенно), .можно повысить степень астатизма на два и т. д. Это дает обращение в нуль соответствующих ко.эффициентов ошибки (8.20). В некоторых случаях сигнач по задающему воздействию может вводиться не непосредствен- 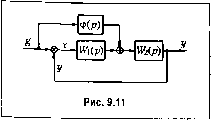 ло на вход системы, как это пока:зано на рис. 9.10, а в некоторую точку внутри канала управления (рис. 9.11). В этом более обнюм случае эквивалентная передаточная функция замкнутой системы будет и.меть вид W{p) Ф(Р) \ + W{p) (9.37) лсшпл ckbt2 > -  * тр(1+Гур)(НГ р) Рис. 9.12 Эквивалентная передаточная функция по оптбке ф 1-Ф(Р)Ц-2(р) (938) Эквивалентная передаточная функция разомкнутой системы Wip) Щ(Р)- Ф(Р) Wip) i-<f>(pW2iP) Условие полной инвариантности Ф(Р) = (9.39) (9.40) В качестве примера рассмотрим следящую систему (см. рис. 6.4) при введении управления по первой производной от угла поворота ко.мандпой оси, которое осуществляется при помощи тахогенератора. Электро.механическая и структурная схемы для этого случая изображены на рис. 9.12. В соответствии с общи.м случаем, изображенным на рис. 9.11, имее.м: (p(p) = k p,W(p) = k ,W2ip) = К, р(\+Тур)(1+гр) Эквивалентная передаточная функция замкнутой системы (9.37) К(1 + т,р) Фэ(р) = TJ,pHTy+TJp + P + K мандной оси. где Т] = 7--постоянная времени цепи первой производной от угла поворота ко-
|
|||||||||||||||