
|
|
|
Главная -> Повышение запаса устойчивости Введем следу1он[ую классификацию нелинейных алгоритмов: 1) фушсциоиальпые нелинейные алгоритмы; 2) логические нелинейные алгоритмы; 3) оптимизирующие нелинейные алгоритмы; 4) параметрические нелинейные алгоритмы. Важным отличием нелиггейиых алгорит.мов от линейных является то, что они придают системе нрипципиальпо новые свойства. Если при линейном алгоритме всегда вырабатывается сигнал, пропорциоца7П)НЫЙ входной переменной или ее производной н т. д., то при иелииейно.м алгоритме может существенно изменяться сам характер действия систе.мы управления на объект в зависимости от величины входного воз.действня. Другими словами, если для линейных систем изменение размера отклонения - это изменение только .масштаба, но не; формы процессов, то в пе.чи-пейной системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменешш картины процессов. Эти особые свойства нелине]Й1ых алгорит.мов можно выгодно использовать в технике автоматического управления. Рассмотри.м отдельно каждый из указанных четырех классов нелинейных алгоритмов. Функционш1Ы1ые нелинейные алгоритмы управления. Функциональны.ми будем называть такие нелинейные алгоритмы, при которых управляющее воздействие на объект выражается в виде нелинейной функции от отклонения его величины, представляющей собой входную информацию для системы. Данный класс .может содержать в себе как статические, так и динамические нелинейности. Примеры статических нелинейностей: м = /г( 1 + h\x \}х, и = /i(sign .т) j + b В отличие от линейного пропорционального, здесь в нервом случае будет более энергичное действие управляющего устройства при больших отклонениях х и больший запас устойчивости установившегося режима. Во втором случае будет менее энергичное, но более плавное его действие вначале и повьниенная точность в установившемся режи.ме, хотя и с меньшим запасом устойчивости. Однако такого рода рекомендации, как увиди.м в дальнейшем, справедливы для большинства систем, по все же не для всех. Поэто.му они требуют специального обследования для каждого объекта. НелинеЙ1И>1Й алгоритм за счет дополнительных нелинейных o6paTinjix связей может включать в себя также нелинейности от выходной величины и: и = kx+ F{u), что раснн)ряет вол.можности целесообраз110]0 нз.менения качества процесса управления. При.меры динамических нелинейностей в алгоритме управления: и-к[\±Ь\х\)х, u = k[\±b\x\)x, и = к[\±\й\)х, где вместо двойного знака подразумевается какой-либо один из них. Обьект dx dt Измерители Логическое устройство Исполнительное устройство Усилнтель-нреобразовате;н> Рис. 2.8 Подобные динамические члены различно влияют иа демпфируюндие свойства системы в не1)еходных процессах в .зависи.мости от раз.меров и скорости отклонения. Они же могут существенно улучшать динамическую точность (т. е. уменьшать динамические ошибки) системы в различных режимах вынужденного движения, воспроизведения различных фо1)М задаваемых входных сигналов, а также при случайных воздействиях. Отметим, что функциональные нелинейные алгоритмы могут быть связаны не tojhjKo с из.мененисм параметров в зависимости от раз.меров входных во.здействий, но и с изменением структуры. Например, при увеличении отклонения управляемой величины сверх определенного порога л: = с в системе может происходить переключение с одного .чииейпого корректирующего устройства па другое. Логические нелинейные алгоритмы управления. Нелинейные законы управ.чеиия могут иметь иные формы, которые реализуются с по.моп1ЬЮ ие фупкциональпых, а более или менее сложных логических устройств. Будем называть их логическими пелипейиы.ми атгоритмами. Например, в системе на рис. 2.8 логический нелинейный алгорит.м может быть применен для экономии управляющих воздействий па объект (а также экономии расхода энергии на нужды управления). Построение простейшего логического нелинейного алгоритма лучше всего пояснить на плоскости двух входных величии м], u.j, (рис. 2.9). Последние с точностью до характеристик пеидеальпо-сти пз.мерителен соответствуют отклонению х и скорости отклонения dx/dt управляемой величины (рис. 2.8). Предварительно за.метим, что если знак скорости dx/di. совпадает со знаком отклоне-ншх, то величина отклонения хпо модулю возрастает. В этом случае требуется энергичное действие управляющего устройства для его ликвидации. 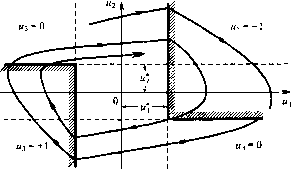 Если же знак скорости dx/dt противоположензнаку отклонения х, то величина \ х\ уменьшается. В этбК!.случае можно вовсе не подавать на объект управляющего воздействия, если CKopoctb dx/dt достаточна для необходимой быстроты ликвидации отклонения, или же подавать воздействие при очень малой скорости dx/dt. Эти рассуждения Н03В0ЛЯ1РТ считать целесообразным, например, применение следующего логического закона упрарлёция. Управляющее воздействие (w3 = +1 или щ = -1) включается только тогда, когда I м,! > U] * (см. рис. 2.9), т. е. когда опслонепие достаточно велико и 2 имеет знак, одинаковый со знаком щ или противоположный, по при малом w21 < 2*- Во всех остальных случаях управление выключено (Мз=? 0), так как при противоположных знаках U2 и Wi и достаточной величине 21 > U2* система сама, без управления возвращается к требуемому положению,г = О (если при этом гарантирована противоположность знаков dx/dt и х). Более подробно эта система будет рассмотрена в разделе IV. Логические нелинейные алгоритмы управления могут быть связаны также с изменением структуры системы. Например, при помощи логического устройства можно включать и выключать сигналы управления но первой и второй производным и но интегралу, в зависимости от сочетания значений отклонения управляемой величины X и скорости отююнения ее dx/dt. Если правильно сформировать логику этих переключений, то .можно существенно повысить качество работы системы. Вместо ко.мбинирования указанных линейных членов могут вводиться также и фyнкциoиaJH>иыe нелинейные члены; включение и выключение сигналов, соответствующих этим членам, производится при по.мощи логического устройства. Тогда получится комбинация функциональных и логических нелинейных алгоритмов. Оптимизирующие нелинейные алгоритмы управления. Оптимальной называется автоматическая система, наилучшая в некотором смысле с учето.м ограничений, накладываемых на величину унравляю1цего во.здействня, координаты, скорости и т. п. Это может быть, например, система, имеющая максимальное быстродействие, или минимальный расход энергии на управление, или .максимальный коэффициеьгг полезного действия. Как правило, при этом приходят к нелинейным алгоритмам управления, хотя, вообще говоря можно оптимизировать и коэффициенты линейного алгоритма, задав его форму. Часто оптимальный нелинейный алгоритм состоит в переключении управляющего воздействия (при определенных состояниях системы) с одного максимально во;!.можного значения на другие, Мо.мептьг переключения в целом определяются сложными ко.мбинациями значений нескольких переменных и их производных. Параметрические нелинейные алгоритмы управления. В предыдущих тинах алгоритмов вводилисъ отгслопения управляемой величины от некоторых заданных ее программных значений. При параметрической программе управления а/поритм может выражаться в виде нелинейных функций текущих координат, в которых задается параметрическая программа. Например, для рассмотренного в § 2.1 закона наведения как параметрической программы управления алгоритм управления имеет вид (2.6), причем для его формирования берут исходную информацию от измерителей расстояния р и скорости сближения р, т. е. тех величин, в которых выражена параметрическая программа.
|