
|
|
|
Главная -> Повышение запаса устойчивости гдсх,(0 - общее решение однородного уравнения D(p) x(t) = О, имеющее вид х.С.еР +С2е-Ч... + СУ , (7.3) причем С,.....С - произвольные постоянные, определяемые из начальных значений ироцссса, ар,.....р - корни характеристического уравнения D(p) = О, , Выражение (7.3) записано для случая отсутствия нулевых и кратных корней. Частное, или вынужденное решение x (t) определяется правой частью уравнения (7.1), и оно соответствует пекоторо.му установившемуся режиму в системе, который будет существовать после затухания x (t). Полпьилрешением (7.2) описывается нронесс управления в линейной системе (общий случай возмуП1Снного движения системы). Первая часть этого решетгя Хп(0 в виде (7,3) Представляет собой собственное движение систе.мы, наложенное на частное решение х (0. Исходное дифференциа.ть1юс ypaBiieinie систе.мы может быть записано также для управляемой величины г/(г;) =g(0 - x{t). В системах стабилизации g(0 = О и поэтому y{t) = -х(0. 11(юбходимо обратить внимание на следуюпюс важное обстоятельство. Частное решение x,(t) складывается из отдельных слагаемых, отвечаюпщх отдельным членам правой части дифференциального уравнения (7.1). Если действует несколько возмуншюпи1х воздействий, то в решении будет соответственно и несколько слагаемых. При этом каждое слагае.мое частного реп1ения x{t) .может определяться по отдельности для каждого воз,мущающе1Х) или задаюпюго воздействия независимо от других, а затем их можно складывать, В этом состоит так называемый npnmuin суперпозиции. Следовательно, если и.меется дифференциальное уравнетге D{p) х(0 = С{р) g(0 + N,(p)A(t) + Л2(Р)/2(0. то частное решение, определяющее установившийся процесс в систе.ме, будет иметь три слагаемых, каждое из которых определяется частным pcnicmicM одного из уравнений: D(p) x(t) = С(р) git); Dip) xit) = h\ip)f,it); Dip) x(0 = Nip)/- Несколько иначе обстоит дело сопределснием переходной состав.тяющей, В решении для переходной составляющей (7.3) произвольные постоянные С . , С должны вычисляться по начальным значениям обязательно с использованием иолно10 выражения решения (7.2), т, е. при исследовании переходных процессов в системах авто.матического управления всегда надо оговаривать соответствующие внешние условия - задавать g(0 и/(О- Если переходный процесс ищется как решение однородного уравнения Dip) xit) = О ири заданных начальных значениях системы, то результат такого решения отвечает случаю отсутствия задающих и воз.мущающих воздействий, причем систе.ма соверишет свободиос движение с какого-то смещецно1о начальногоположения. Если же переходный процесс происходит в результате изменения вне1пних условий (возмущающих сил, изменения нагрузки, перенастройки, измене1Н1Я режима слежения и т. п.), то этот переходный процесс надо исследовать иначе, с опредслсни- 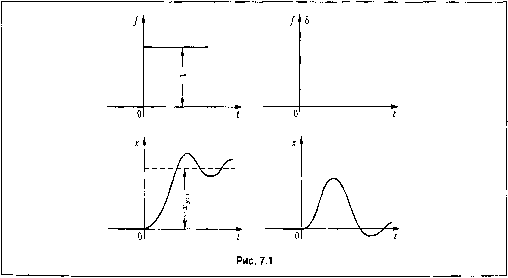 ем произвольных постоянных из полного решения, включающего в себя установившуюся составляющую. Вид всздействия g(C) или f(t) и стоящих перед ними операторных многочленов оказывает суи1ествеиное влияние на вид переходного процесса. При нахождении кривой переходного процесса в системе автоматического управления возникают две трудности. Первая трудность - принципиального характера - заключается в том, что в реальных системах управления управляющие и возмущающие воздействия не являются известны.ми функциями времени, а носят случайный характер. В связи с эти.м приходится рассматривать некоторые типовые входные во.здействия. Ънювые входные воздействия стремятся выбирать так, чтобы они были по возможности близки.ми к реа..тьным во.здействиям в системе автоматического управления. Для следящих систем при g{t) = О и систем стабилпзацри1 переходный процесс может строиться для случая приложения возмущающего во.здействня. В качестве типовых исполь.зуются возмущаюпще воздействия в виде единичной ступенчатой функции f(t) = 1(0 и в виде единичной и.мпульсной функции f(t) = 8(t). Эти типовые возмущения изображены па рис. 7.1. Входная функция первого типа часто встречается в систе.мах автоматического регулирования и представляет собой внезаиньн! скачок возмущающего воздействия па некоторую постоянную величину, нанри.мер увеличение тока нагрузки генератора, увеличение момента нагрузки двигателя и т. п. Реакция системы ца такое воздействие, построенная для управляемой величины пли для опщбкн, отличающихся только знаками (x(t) = -y{t)), представляет собой переходную функцию системы для данного возмущения. Входная функ1Н1я второго типа также встречается в системах автоматического управления в виде кратковременного удара нагрузки, например прн коротком за.мы-кании .электрического генератора, которое прекращается через небольшой нро.межу-ток времени системой .защиты (плавкие предохранители, максн.мальные автоматы и 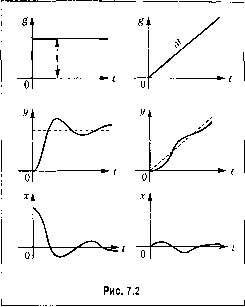 т. п.), нрн кратковременном возрастании момента нагрузки двигателя и т. д. Реакция системы на воздействие этого типа представляет ее функцию веса. В следящих системах для построения переходного процесса могут приниматься тигювые задающие воздействия (рис. 7.2) в виде едипичиой ступенчатой функции g(t) = 1(1) или в виде во,здействпя, изменяющегося по липейно.му закону g(t) = = at 1(0- Во.здсйствис первого типа соответствует, например, в следящих системах воспроизведения угла быстро.му повороту ко.мандпой оси на некоторый угол. Реакция системы i/(t) па такое задающее воздействие представляет собой ее переходную функ1Н1Ю для задающего воздействия. Воздействие второго тина является характерным для следяищх систем воспроизведения yi-ла, когда ко.ман,1ная ось внезапно начинает двигаться с постоянной скоростью. Возможно изучение поведения систе.мы управления и в том случае, когда входное воздействие представляет собой не дстермиппрованную (определенную), а случайную функцию времени. Этот вопрос будет рассмотрен в главе 11. Вторая трудность - пеприппипиалыюго характера - заключается в том, что обычно систе.мы описываются дифференциальными уравнениями сравнительно высокого порядка. Это усложняет практические расчеты; потому для облегчения зата-чи построения кривой нсрсходпого процесса во многих случаях приходится применять вычислительные устройства непрерывного действия и цифровые вычислительные .машины. Для сложных авто.матпческих систем в настоящее вре.мя этим .метода.м отдается предпочтение. Важно от.мотить, что при использовании вычислительных мапшн часто можно обходиться без составления дифференциа.аьных уравнений тех звеньев автоматической систе.мы, для которых имеются действую1цие макеты. Тогда для остать-ной части звеньев тшбираются их дифференциальные уравнения на вычислительной машине, к которой подключаются имеющиеся лействую1цис .макеты. Это свойство можно использовать для испытания и настройки систе.м в лабораторных условиях. Ниже будут рассмотрены наиболее распространенные методы построения кривой переходного процесса. К ним относятся метод непосредственного решения линейных дифференциальных уравнений, или так называемый классический .метод, использование преобразований Фурье, Лапласа и Карсопа-Хевисайда, и исполь;ю-вание вычислительных машин. В дальнейшем изложении будем рассматривать построение переходного процесса для ошибки x(t). Однако методика остается единой и для дру1их счучаев построения переходного процесса, например для отыскания y{t) при g(t) Ф 0.
|