
|
|
|
Главная -> Повышение запаса устойчивости Таблица 12.7. Параметры переходных процессов
13,8 7,75 26,5 5,85 37,2 5,45 44,6 7,25 . 1 Различие будет 11аблюдаться в начальной части, если высокочастотная часть л. а. x. отличается or высокочастотной части л. а. х. типа 2-1-2, и в конечной части, если будут отличаться их низкочастотные части. , Таким образо.м, в случае нужды оценка переходных процессов может делаться по упиверсалыгы.м кривым, [фиведенным на рис. 12.19, во всяком случае для средней части кривой переходного процесса, которая показывает степень склонности системы к колебания.м. В тех случаях, когда л. а. х. не имеет специального участка с наклоном -20 дБ/дек при переходе оси частот (см. например, рис. 12.15 и 12.17), оценка переходных процессов может быть сделана следующим образом. В качестве исходной при.мем л. а. х, типа 1-2 (рис. 12.15). Ей соответствует передаточная фупк11ия (12.89). Вводя единичное ступенчатое воздействие (г), можно аналогично изложенно.му выше построить нор.мироват1ые переходные процессы в функции безразмерного времени (рис. 12.20). Здесь в качестве щ принята частота пересечения асимптоты, и.меющей наклон -20 дБ/дек, с осью частот (рис. 12.15). Эти же кривые переходного процесса могут использоваться для оценки переходного процесса в случае использования л. а. х. другого типа, например 1-2-3 или 0-1-2 (рис. 12.17). Как и в предыдущем случае, различие может наблюдаться только в начальной и конечной стадиях переходного процесса. Построение низкочастотной области желаемой л. а. х. Построение желаемой л. а. x. начинается с низкочастотной области. Из условий требуемой точности работы определяется положе-иие контрольной точки или запретной области (см. рис. 12.8). Низкочастотная часть л. а. х. должна проходить не ниже koii-трольной точки или так, чтобы не заходить в запретную область. В следящих системах с астатизмом второго порядка положение первой низкочастотной асимптоты, имеющей наклон -40 дБ/дек, опреде- 1,4 1,2 1,0 0,8 0,6 0,4 0,2 О
1 2 3 4 5 coo ляется совершенно однозначно. Из усювий облегчения задачи демпфирования выгодно сдвигать эту асимптоту как .можно более влево, т. е. в сторону низких частот. Очевидно, что предельное положение первой аси.мптоты будет в том случае когда она или пройдет через контрольную точку Л,;, или сольется с правой границей запретной области (рис. 12.21). Необходимое значение базовой частоты л. а. х. (йд и необходи.мый коэффиписнт передачи разо.мкнутой системы определяются из выражения (12.50): ± м-1 I М 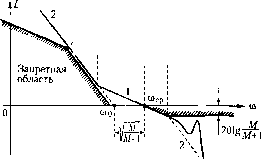 Рис. 12.21 .2 тт- Imax в следяпнх системах с астатиз.мом первого порядка необходимо определить положение двух первых асимптот, что .можно сделать раз.шчны.м образом в зависимости от выбранного значения тгервой сопрягающей частоты 0), = 1/Г,. Если принять, что первая сопрягающая частота бг;льше контрольной частоты не менее чем в 2-3 раза, то первые две асимптоты .можно j)ac-положить так, чтобы через коггтрольную точку прошла первая асимптота (рис. 12.22, а). При этом коэффициент усиления по разо.мкнутой цепи пли добротность ио скорости будет иметь минимальную возможную величину, равную пределыюму значению, опре-деляе.мо.му из (12.49): max LJ ЧТО является благоприятным. Однако частота точки пересечения второй асимптоты с осью нуля децибел щ будет значительно больше ми-ни.мального достижи.мого значения, определяемого ио требуемому иредельному коэффициенту передачи ио ускорению (12.50). .Это является нежелательным, так как вся л. а. х. будет сдвигаться в область более высоких частот, что 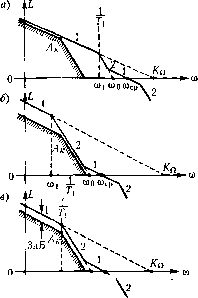 Щ=у1к = ,~- (12.104) Ппах В статических следящих системах, а также в систе.мах стабилизации построение низкочастотной части делается в соответствии с фор.мулами (12.56)-( 12.61). Построение средне- и высокочастотной частей л. а. х. В систе.мах с астатиз.мом второго порядка (рис. 12.21) необходимо осуществить типовой переход оси нуля децибел в соответствии с рис. 12.10. При этом известно значение базовой частоты Щ- Требуемое значение постоянной времени Т2 определяется формулой (12.73). Среднечастотпой части л. а. х. соответствует асимптота с единичным наклоном, проходящая в интервале амплитуд > Л(со)>- или в интервале частот М-1 М + 1 1 М-1 М + 1 /19 Шб - = (0 ->со>со - (Iz.iuj; затрудняет демпфирование вследствие относительного возрастания влияния всех ностоя1тых времени системы. Если теперь принять, что первая сопрягающая частота со, меньше контрольной частоты (Л по крайней мере в 2-3 раза, то первые две асимптоты можно расположить так, чтобы через контрольную точку ]рошла вторая асимптота (рис. 12,22, б). При этом частота пересечения второй аси.мптоты с осью нуля децибел ©обудет иметь .\ui-ни.мальную возможную величину, определяемую предельны.м значением добротности по ускорению (12.50), что является благоприятны.м с точки зрения облегчения демпфирования системы. Однако при этом требуемый коэффициент передачи разо.мкнутой системы /Cjj бздет в 2-3 раза превышать минимальное воз.можное значение, определяемое формулой (12.50). Увеличение коэффициента передачи может неблагоприятным образом сказаться иа возрастании влияния помех и наводок на входе. По.этому выбор того или иного расположения низкочастотной части л. а. х. относительно контрольной точки должен определяться конкретными условиями. При отсутствии преобладания того или иного фактора оптимальным следует считать такое расположение низкочастотных асимптот (рис. 12.22, ), при которо.м первая сопрягающая частота cOj совпадаете контрольной частотой (Л. Так как истинная л. а. х. в точке О) = О), проходит ниже точки пересечения двух асимгггот иа 3 дБ, или на л/2, го вся л. а, х. при со, = со, должна быть поднята вверх на 3 дБ. При этом требуемое зпачепие коэффициента ]1ередачи =72. (12.103) шах-Точке пересечения второй асилттоты с осью нуля децибел соответствует частота
|