
|
|
|
Главная -> Повышение запаса устойчивости 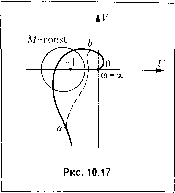 наличии в кана,1е управления неминимально-фазовых звеньев. Однако это пе означает, что данный метод .может быть рекомендован для использования во всех случаях. Поднятие верхних частот раснгиряет полосу пропускания системы, что приводит к увеличению ее быстродействия и одновременно усиливает влияние на систему высокочастотных ггомех. При большом уровне помех иа входе или в каггале управления поднятие верхних частот может привести к неприемлемым результатам. Поэтому данный метод демнс})ироваппя и.меет ограничен1гую сферу ири.менеиия. Она определяется в основном теми случая.ми, когда введение положительного фазового сдвига является пригппнша.,1ь-ио необходимым для получения устойчивой )аботы, а также теми случаями, когда необходимо повысить быстродействие системы п)н допустимости воз)астаг1ия влияния вьгсокочастотги>1х помех. В некоторых случаях при поднятии верхних частот приходится предусматривать ме)ы одпов)емеппого подавления высокочастотных помех путем введения специальных узко- или гниюкополосных фильтров. Игюгда задача может оказаться вследствие этого весь.ма сложной. Демпфирование с подавлением средних частот. Выведеиие амплитудпофазо-вой характеристики из запретной зоны (рис. 10.17) .может быть произведено при помощи подавления усиления в области частот, соответствуюп1ей части характеристики .между точками а и В результате будет получена характеристика, изображенная иа рис. 10.17 пунктиром. Подавление средггих частот может быть осуп1ествлено включением в цепь управления последовательного интегро-дифферепг1ируюигего звена (табл. 10.1), имеющего л. а. x., изображенную там же. Из вида л. а. х. вытекает, что звено подавляет усиление в некоторой области средних частот. Вместо пассивного интегро-диф-ферепцирующего звена .могут применяться его эквиваленты, например гибкая отрицательная обратная связь, охватывающая инерционный усилитель (табл. 10.4). По своим свойствам демпфирование с гюдавлепием средтгих частот занимает промежуточное положение между двумя рассмот)еппыми метода.ми. П)и демпфировании с нодавлеггием средних частот сохраняется бьгстюдействие систе.мы и сохраняется полоса ггропускания. Этот вид демпфирования является наиболее )аспростра-пенпы.м. Демпфирование с введением отрицательных фазовых сдвигов. Сущность этого метода можно уяснить, например, из расс.\1от)еиия эис. 6.22. На рис. 6.22, б изображен случай, когда из-за наличия в канале разомкнутой системы консервативного звеиа, имеюп1его чисто мнимые полюсы, замкнутая система будет неустойчивой. До-бавлетше отрицательного фазового сдвига вызовет закручивание а. ф. х. по часовой стрелке. В )езультате система в замкнутом состоянии может быть сделана устойчивой (рис. 6.22, а). Введение отрицатетьпого фазового сдвига производится иснользовапием ггос-ледовательных корректируюптих звеньев фазосдвигающего типа (табл. 10.1). Так как подобные звенья оказываются обычно неминимально-фазовыми, то такой метод демпфирования иногда называют в литературе методом демпфирования с использованием неминимально-фазовых звеньев. Демпфирование с введением отрицательных фазовых сдвигов оказывается эффективным в случае наличия в канале разомкнутой системы консервативных, а также колебательных звеньев со слабым демпфированием. В нервом случае это приводит к появлению в амплитудной частотной характеристике (или в л. а. х.) резонансных пиков бесконечной высоты, а во второ.м - к резонансным пика.м конечной, но значителыгой высоты. Использование демпфирования других типов здесь оказывается затруднительным. По своим свойствам этот метод демпфирования сходен со случаем подавления средрп1Х частот, так как фазосдвигающие звенья обычно пе вносят изменений в амп-литудпую частотную характеристику и .модуль их частотной передаточной функции 111яО1>)1 = 1. В резу;н>тате сохраняется быстродействие демпфируемой системы и сохраняется ее полоса пропускания. Рассмотрентяе выше методы демпфирования являются основны.ми, полить иллюстрируют те идеи, кото})ые используются при повышении запаса устойчивости. В практике, в зависи.мости от конкретных условий, могут использоваться и более сложные изменения динамических свойств системы управления. Так, папримс]), может осуществляться подавление средних частот с одновременным поднятием высоких, поднятие высоких частот с подавлением их некоторой области (фильтрация определенных частот) и т. п. § 10.6. Примеры 1. Система управления движущимся объектом. Рассмотри.м систему управления, изображенную на рис. 10.18. Здесь обозначено: ГН - гироскоп направления, измеряющий отклонение движунюгося объекта от заданного курса; П - нотенцио-.метр; Д - двигатель рулевого устройства и Р -- редуктор. При отклонении объекта отзаданного курса на угол а движок нотетщиометра отклоняется на тот же угол. В результате на усилитель поступает напряжение. Пройдя усилитель, это напряжение поступает на двигатель и руль объекта начинает поворачиваться. Составим передаточную фупкпию разомкнутой системы. Для этого oтcoeдиииr гироскоп направления от объекта и введем обозначения aj - угол отк;юнения гироскопа и а2 - угол поворота объекта (в за.мкпутой систе.ме а, = а2 ос). Передаточная функция разомкнутой системы Найдем передаточные функции отдельных звеньев. П о т е и ц и о .м е т р. Считая потенциометр безынерционным звеном нолучае.м W,(P) = = (10.47) гяек - крутизна потенциометра [В/рад]. У с и л и т е л ь. При безынерционном усилителе W,(P) = --2- (10.48) где 2 ~ коэффициент усиления по напряжению. Двигатель совместно с редуктором. Передаточная функг(ия двигателя с редуктором в случае пренебрежения переходными процессами в об.мотке управления имеет вид где 3 - коэффициент передачи двигателя совместно с редуктором по скорости [рад/В с], а Гд - электромеханическая постоянная времени. Объект. Будем считать, что угловая скорость поворота объекта но курсу пропорциональна углу отклонения руля. Тогда угол поворота будет пропорциопалеп интегралу от угла поворота руля гго времени. При учете инерционности объекта его передаточная функция имеет вид где - коэффициент передачи объекта [с J, Tq - постоянная времени объекта. Передаточная функция разомкнутой систе.мы W(p) = W,(p)W2(p)W,{p)W,(p)= (10.51) р(1 + 7;,р)(1 + Го;?) где К [с~] - коэффициент нередачи разо.мкнутой системы. Найде.м характеристическое уравнение системы \ + \V(p) = 0. (10.52) После подстановки получаем Tjy + (T,+ T,)p+p + K-0. (10.53) Достаточно одного взгляда на это уравнение, чтобы убедиться в неустойчивости системы при любом коэффициенте передачи К. Это вытекает из того, что в характеристическом уравнении отсутствует член с операторо.м в первой степени. Такая пе-
|