
|
|
|
Главная -> Повышение запаса устойчивости необходимо X за.менить найденной выше функцией (22.20). Тогда в уравнении (22.21) останется одна неизвестная величинаа. Учитывая формулы (11.91) и (11.92), уравнение (22.21) .можно .записать в виде ai = hl ( X , Of), (22.23) где h - постоянный множитель, выносимый за знак интеграла (формулы для вычисления интеграла 1 приведены в приложении 1). Таким образом, путем решения уравнения (22.23) с подстановкой (22.20) будет найдено среднеквадратичное отклонение а,а затем но формуле (22.20) будет вычислено и .математическое ожидание f, т. е. полностью определится иско.мое приближенное решение уравнения (22.15): х + х 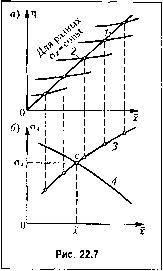 (22.24) Это решение справедливо для случая уста1Ювившегося режима при стационарном случайном ироцессе. Однако зависимость х (а) датеко не всегда можно выразить из уравнения (22.19) в явном виде ввиду сложности выражения F (х, а.). Поэто.му в большинстве случаев придется решать совместно два уравнения, (22.19) и (22.23), либо численно, путем носледовательных приближений, либо графически. Можно применять, например, следующий графический прием. Представим уравнение (22.19) в виде двух уравнений: 5Х0)/ Ж( ). йФ) Q(0) (22.25) Первое из них дает прямую 1 (рис. 22.7, а), а второе - серию кривых 2 для различных постоянных значений х, о. Перенеся все точки пересечения этих кривых с прямой 1 на плоскость координат х , а(рис. 22.7, б), получим завнси.мость a,.( х ) в виде кривой 3, так как каждой точке пересечения на верхнем графике соответствовало определенное значение а,.. После .этого построим (рис. 22.7, б) еще одну зависимость а.( х)в виде кривой 4 по формуле (22.23), подставляя в правую часть этой формулы значения а, взятые для каждого х из кривой 3. Очевидно, что координаты точки пересечения С кривых 3 и 4 представляют собой иско.мый ре:!ультат совместного решения уравнений (22,19) и (22,23). Во нссх задачах здесь н далее буде.м искать приближенное poHieiiHC только для iiepe.viennoii х, стоящей иод знаком пелипейиости. Когда оно майдемо, всегда .можно через соответст у1ом1ие иередаточ1н.1е функции найти приближенное реишние и для других переменных системы. Вторая 3 а л а ч а. Перейдем теперь к реше11ию другой задачи, когда ис-с;1едуется пеустаиовивщийся процесс. Часто в автоматических системах управления разложению искомого рете-иия (22.24) па х и х соответствует разложенце его па полезный регулярный сигнал .г и случайную помеху х . Когда полезный спгпа.! управления X изменяется во времени, процесс уже пе будет стационарным. Однако если помехи (флуктуации) характеризуются спектром значительно более высоких частот, чем полезный сиг-пал, .можно считать последний медленно меняющимся. Тогда .можно исследовать случайный процесс в первом приближении как стационарный, при.мепяя формулу (22.23). Но при .этом ;У1Я определения ритлярпой состав.1ЯЮ1цей х нельзя нолыюваться ачгебраи-ческим уравнением (22.19), а надо обращаться к днфференциальпо.му уравнению (22.17). В этом случае описанное выше графическое решение ие годится и следует гюсту-нать иначе. Сначала надо из уравнения (22.23) определить зависимость о.( х ). Для .этого по аналогии с графическим peineimeM (21.25) разобьем уравнение (22,23) на два уравнения: 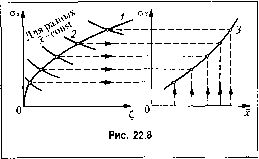 hl (x, Од.) = С (22,26) Первое из них дает параболу / (рис. 22.8), а второе - серию кривых 2 ирн разных постоянных :шачениях х. Перенеся ординаты их точек пересечения па плоскость х, и отложив для каждой из них соответствующие кривым 2 абсциссы х, !юлучи.м в виде кривой 3 (рис. 22.8) искомую зависимость о, (.v). Подставив полученную зависи.мость х) в вычисленное для заданной нелинейности согласно § 22.1 выражение Fix, а,), (22.27) исключим из пего величину а. и получим функцию от заданной переменной / -Ф(х), . (22.28) которую, как и в главе 19 и § 21.2, можно назвать функцией смещения, так как здесь .математические ожидания х и Р представляют собой смещения центра случайных составляюпщх, Ко1-да функция смещения (22.28) найдена, ее .чюжпо подставить в урав1ЮШ1е (22.17): QiP) X + /г (/;) Ф (.V ) = 5 ip) f it), (22.29) По аналогии с. нведенмыми рапсе функциями смещения это будет сглаженная при помощи случайных флуктуапни нелинейная характеристика для медле1н10 .меняющейся состаиляюн1ей процесса. и отсюда по задатюй функции / (О найти путем решения дифференциа,тьпого уравнения ре1уляриую составляющую процесса x(t). В больпшнстве задач функция смещения (22.28) будет и.меть вид плавной кривой (рис. 22.9), которую в некоторых пределах можно подвергнуть обычной линеаризации = tg3. .i=0 (22..S0) 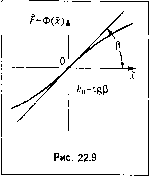 В случае, если систе.ма такова, что линейная часть с передаточной функцией Q(p) не пропускает спектр частот, соответствующий флуктуациям f {t) и определяемый спектральной плотностью sy((a), отыскавие величины а. значительно упроп1ается, а именно из (22.21) следует 5(;ш) Q(;w) i / (ш)/со. (22.31) т. е. не будет зависеть от формы пелинейностп и от величины х . В этом случае вместо дифференцирования функции смещения (22.28) можно определить i пепосрсдственно из (22.27): F - kjx, i - Здесь k получается как функция от А = k, (а,). (22.32) (22,33) Затем надо подставить величину а,., найденную из формулы (22.31). Вместо этого .можно воспользоваться кривой на рис. 22.3, 6-22.6, б, соответствующей найденному значению а.. При :-)том вычисление интеграла (22.31) производится но готовым формула.м aj. =/г/ (см. приложение 2). В ре.зультаге подстановки (22.30) или (22.32) уравнеиие для определения pei-уляр-пой составляющей (22.29) станет линейным: IQip) + k R (р)] .V = 5(р) 7 (О. (22.34) Оно 1)ешается при помощи обычного характеристического уравнения Q(j})+KR(p)- 0. (22,35)
|