
|
|
|
Главная -> Повышение запаса устойчивости иусиые вращающиеся трансформаторы, ЛВТ - линейный вращающийся трансформатор, Д - двигатели, Р - редукторы, ТГ - тахогеператор. Передаточная функция исходной системы бе.з интегрирующего .звена (9.1) была выведена в § 6.2. Передаточная функция разомкнутой системы, изображенной на рис. 9.2, будет отличаться от (9.1) наличие.м донолнительного множителя k/p, который дает интегрнруюпхее звено. В результате получи.м передаточную фушсцию ра;юмкнутой системы в виде P(i+Typ)(\ + T p)J~ р(\ + ТуР)(1 + Т р) - где = К [с] - добротность сисгемы но ускорению. Эта передаточная функция соответствует уже астатизму второго порядка. Передаточная функция системы по ошибке 1 рЧ1+7;.р)(1-ь7;.р) lW{p)- p\xTyP)(yV\\p)K- (9.4) Раскладывая .эту функцию в ряд делением числителя на знаменатель, получаем вместо (9.2) следующие равенства для коэффициентов ошибок: С2 1 Сз Ту+Гм == Т = ¥ (9..5) Сравнивая (9.5) с (9.2), можно заметить, что в результате введения интегрирук;-щего звена вследствие новьипения порядка астатиз.ма получено условие с, = О, и, следовательно, будет равна нулю скоростная составляющая ошибки. Однако, если проверить теперь систему на устойчивость, можно убедиться, что систе.ма вообще не может работать, так как получить устойчивую работу иечьзя ни при каком значении общего коэффициента передачи /Ср. Это называется структурной неустойчивостью. Действительно, передаточной функции (9..3) соответствует характеристическое уравнение ГуГУ + а\, + т )р+р + к, =0, в котором отсутствует член, содержащий оператор р в первой степени. Пропуск одного из членов в характеристическом уравнении всегда соответствует неустойчивости в соответствии с § 6,1. Появление неустойчивости в рассматриваемой системе при повышении порядка астатизма можно проиллюстрировать па логариф.мических характеристиках. Для передаточной функции (9.1) они построены на рис. 9.3, а по выражениям: I(aj) = 20lg-=/; (9g) ]l = -90° - arctg шУ; - arctg шГ . (9.7) 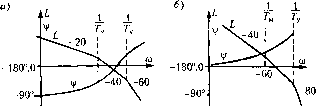 Рис. 9.3 Логарифмические характеристики л-ш иередаточной функции (9.3) построены иа рис. 9.3, б по выражепия.м: L(a)) = 20lg- 2-г2 (9.8) V = -180° - arctg (оГу - arctg а)Г . (9.9) Сравнение рис. 9.3, а и 9.3, б, а также фор.мул (9.7) и (9.9) показывает, что введение интегрирующего элемента дает дополнительный фазовый сдвиг (-90°), в результате чего в рассматриваемой схеме нельзя добиться устойчивой работы ни при каком значении коэффициента передачи К. Однако это не означает, что схе.ма является вообще неработос1к;собной. Введение в нее корректируюпшх средств (см. главу 10) позволяет пе только достичь устойчивости, по и обеспечить определенный запас устойчивости, т. е. выполнить требования к качеству процесса управления. Применение изодромных устройств. Существует путь повышения порядка астатизма систе.мы без заметного или недопустимого ухудшения ее запаса устойчивости. Этот путь заключается в применении и.зодро.миых устройств, например таких, как изображе1ии>1е на рис. 4.19. Структурная схема системы при введении изодромпого устройства изображена па рис. 9.4. Передаточная функция изодромпого устройства может быть представлена в виде (9.10) Де T =---постоятигая времени изод- ромного устройства. При.мер введения изодромпого устройства показан на рис. 9.5. На рис. 9.5, а изображен чувствительный элемент регулятора давления с противодействующей пружиной. Если пе учитывать массу движупшхся частей, то перемещение чувствительного Изодро,мный элемент I L----------- w{p) 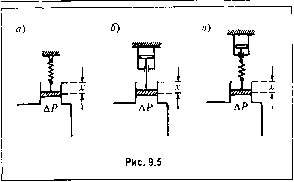 элемента будет пропорциональным oTicioHcimro давления от заданного значения: х = кАР, (9.11) где 1 - коэффициент пропорциональности, определяемый жесткостью пружины. Ыа рис. 9.5, б изображен тот же элемент, но с нротиводействую-пшм де.мпфером. Так как сила, развиваемая демпфером, пропорциональна скорости перемещения его поршня, то в этом случае будет иметь место соотношение рх = k2AP. Вместо (5.11) получим хЛаР, Р (9.12) где 2 - коэффициент, определяемый скоростным сопротивлением демпфера. Равенство (9.12) соответствует введению интеграла в ац-оритм управления. Наконец, в случае, изображенном на рис. 9.5, в, перемешение чувствительного элемента будет складываться нз деформации пружины и перемешения нор1ння демпфера: (9.13) постоянная времени изодромпого устройства. В качестве второго примера рассмотрим приведенную выше схему следящей системы (рис. 9,2). Переход от введения дополнительного интеграла к введению изод-ромного устройства .может быть сделан добавлением связи, показатюй пунктиром. Передаточная функция разомкнутой системы можетбыть полуюпаумтюжением (9.1) на передаточную функцию изодромного устройства. В результате для рассматриваемой схемы получи.м: Р{\ + Тур){\ + Т р) ,Д1 + Г р) K,{UT,p) p\\ + l\p){UTp) (9.14) где = kK [с ] - добротность систе.мы но ускорению. Ко.зффициенты ошибки определяются равенствами: С2 1 (9.15)
|