
|
|
|
Главная -> Повышение запаса устойчивости Поэтому спектральная плотность (11.77) может быть записана в другом виде: , 2TD 2ixD 1 + (iiT- \х. + (Л Af = = 2л л - полоса частот для спектра-чьной плотности. Этому процессу соответствует корреляционная функция R(!:) = -\S((a)cos(uxd(a = - coscoT</a) = -sincOnT. (1174 nl к J ЛТ Корреляционная функция также изображена на рис. 11.21, б. Для этого процесса Среднеквадратичное значение случайной величины пропорционально корню квадратпо.му из полосы частот; ct = VD=VaVa/- (ПЛб) Часто бывает удобнее аппроксимировать зависимость (11.73) плавной кривой. Для этой цели можно, например, использовать выражение где р. = 1/Г- коэффициент, определяющий ширину полосы частот. График спектральной плотности, соответствующий этому выражению, построен на рис. 11.21, в. Для частот -р. < ю < р, процесс приближается к белому шуму, так как для этих частот Интегрирование (11.77) по всем частотам дает возможность определить дисперсию: 1 7 Mdw N Корреляционная функция для этого процесса Л(т) = (11.79) Корреляцио1П1ая функция также изображена на рис. 11.21, е. 2 . Типовой входной с и i- и а л следящей систем ы. В качестве типового сигнала для следящей системы часто принимают график изменения угловой скорости на входе в соответствии с рис. 11.22. Скорость сохраняет постоянное значение в течение некоторых интервалов времени (1, t-j, ...). Переход от одного значения к друго.му совершается мгновенно. Интервалы времени подчиняются закону распределения Пуассона (11.4). В соответствии со сказанным выше будем считать, что математическое ожидание Q = О , а средний квадрат скорости равен дисперсии, т. е. = D 0. График такого вида получается, напри.мер, в первом приближении при слежении радиолокатором за движущейся целью. Постоянное значение скорости соответствует движению цели по прямой. Перемена знака или величины скорости соответствует .маневру цели. Обозначим р, среднее число перемен скорости за одну секунду. Тогда Г = 1/р будет средним значением интервала времени, в течение которого yi-ловая скорость сохраняет постоянное значение. При.ме]И1тельно к радиолокатору зто .значение будет средним временем движения цели по пря.мой. Для определения корреляционной функции необходимо найти среднее значение произведения /?(т) = £2(0О(г + т). При нахождении этого произведения могут быть два случая. 1. Моменты вре.мени int + x относятся к одному интервалу. Тогда среднее значение произведения угловых скоростей будет равно среднему квадрату угловой скорости или дисперсии: /?j(T) = Q(OQ(t + T) = iy =Од. 2. Мо.меиты времени t wt + т относятся к разным интервалам. Тогда среднее значение произведения скоростей будет равно нулю: /?2(T) = Q(O£2(Z+T) = 0, так как ироизведения с положительным и отрицательным знака.мц будут равновероятными. Корреляциоппая функция будет равна Л(Т) = Р,/?, (Т)+Р2/?2(Т) = Л , гдеР, - вероятность нахождения моментов вре.мени и г -i- т в одном интервале, а Р2 = 1 Р] - вероятность нахождения их в разных интервалах. 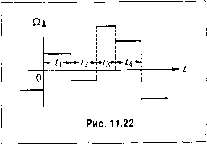 I т Устремив Дт О и переходя к пределу, получим Р= hin 1--I =е дт-о1 Т ) и окончательно /?(,) = D,/y=QVr, (11.80) Знак модуля при т поставлен вследствие того, что выражение (11.80) должно соответствовать четной функции. Выражение для корреляционной функции совпадает с (11.79). Поэтому спектральная плотность рассматриваемого процесса должна совпадать с (11.78): Si) = --Ш = -Г- (11.81) Заметим, что в отличие от (11.78) фор.мула спектральной плотности (11.81) записана для угловой скорости процесса (рис. 11.22). Если перейти от угловой скорости к углу, то получится нестационарный случайный процесс с дисперсией, стремящейся к бесконечности. Однако в большинстве случаев с.тедящая систе.ма, па входе которой действует этот процесс, обладает астатизмом первого и более высоких порядков. Поэтому первый коэффициент ошибки Cq у следящей системы равен нулю и ее ошибка будет определяться только входной скоростью и производными более высоких порядков, относительно которых процесс стационарен. Это дает воз.можность использовать спектральную плотность (11.81) при расчете динамической ошибки следящей системы. 3. Нерегулярная качка. Некоторые объекты, напри.мер корабли, самолеты и другие, находясь под действием нерегулярных возмупюиий (нерегулярное волнение, атмосферные возмущения и т. п.), движутся но случайно.му закону. Так как сами объекты и.меют определенную им свойственную, частоту колебаний, то они обладают свойством подчёркивать те частоты возмущений, которые близки к их Вероятность появления перемены скорости на малом промежутке времени Дт пропорциональна атому промежутку и равна цДт или Дт/Г, Вероятность отсутствия перемены скорости для этого же промежутка будет 1 - Дт/Г. Для интервала времени т вероятность отсутствия перемены скорости, т. е. вероятность нахождения моментов времени tut + xn одном интервале постоянной скорости, будет равна произведению вероятностей отсутствий перемены скорости на каждом элементарном промежутке Дт, так как эти события независимые. В результате для конечного промежутка Дт получаем
|