
|
|
|
Главная -> Повышение запаса устойчивости 9(а,со) = (18.156) -CO. (18.157) Эти два уравнения с дву.мя неизвестными а и со решаются графически. Для этого по формулам (18.154) с учетом (18,151) и (18.152) строятся грас})ики q (со) и q (со) при разных значениях а = flj, а, а,... (рис. 18.31, а). Зате.м на первом из них наносится кривая 1, определяемая правой частью уравнения (18.156), а на втором - кривая (18.157). Решение определится точками пересечения, для которых значения а = а и со = СОп одинаковы на обоих графиках. Найденные значения а и со будут ис-комымрг амплитудой и частотой автоколебаний,оп-ределяе.мых приближенно в видех = а sin сОп t. Полученные конкретные чис/ю- соответствуют все.м заданны.м пара.метрам объекта и системы упраштения. Если изменить параметры систе.мы, из.менятся также з,. 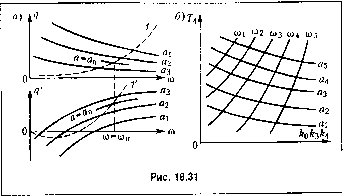 Найденные значения ди q согласно (18.151) и (18.152) являются вполне определенными функциями искомых величин а и со (амплитуды и частоты автоколебаний !!ереме1Н10Йх). Характеристическое уравнение рассматриваемой систе.мы в целом после указанной гармонической линеаризации нелинейности, согласно (16.66)-( 16.69) и (18.153), принп.маетвид Т,Т,Т + (TJ, + ГоГ, + ГзГ,)+ (Го + 7з + Г, )р+р + к,кф, р + + кокзкд(а,т) = 0. (18.155) Для отыскания синусоидального периодического решения подставляем р =joi. Нолучае.м вещественную и мнимую части соответственно X = kok q (а, со) - (Го + Тз + 71 + со = 0; У = кдккд (а, со) + со - (TJ. + TJ + Г3Г4) со = 0. Отсюда и 0). На том же графике можно п[)Оследить влияние изменения параметров системы, для чего нужно менять коэффиииенты правых частей (18.156) и (18.157) при построении пунктирных кривых 1, 1 нарис. 18.31,а. Изложенное выше решение удобно, если все параметры системы заданы. /1ля изучения же зависимости а и со от параметров системы (т. с. для выбора параметров) целесообразнее применить другой путь решения задачи. Допусти.м, необходн.мо выбрать общий ко;)(к})иииснт усиле1шя k(k.Ji с учето.м влияния ра,зличных воз.чюжных значений постоянной Гд. Тогда, исключая kkrk из уравнений (18.156) и (18,157), находим 1 (1-ТоТ;Со2)?(а,со) + (7о + 7з)сог/(й,со) а затем k k k 2 (Го+т,)+Гд(1-7;,тУ) Задаваясь теперь различны.ми зиачения.ми а и со и вычисляя каждый раз по этим фор.мулам 1\ и kkji/ получи.м сетку линий равных значений о) (о)]. щ,.,.) и а (а Oj, ...), показанных парне. 18.31, б. По этой диагра.м.ме удобно выбирать значения параметров kk-Ji/ и 1\ для получения желаемых а и со. Кро.ме того, важными параметрами являются А к. и особенно м, и (см, рнс. 18.29). Но они входят в выражения qw q . Поэтому для опреде.теиия их влияния нужно построить графики q и q д.тя разных значений указа}1иых !1араметров, а затем, задаваясьз!!ачспиями а и сои используя соотношения (18.156) и (18.157), по потребным зиачешгям q и q определять эти параметры {и к, или к,). При этоуг нужно учитывать, что из требования вен1ествеппости выражений (18.151) и (18.152) следует выбирать ut<-- т2 2 7, 0) 1 T.f(d +1 Пример 4. Рассмотрим систему автоматического управлепия с двумя нслн-пейпостя.ми в случае, когда их гармоническая линеаризация по отдельности певоз- .можна вследствие отсут- £2 Р ствия свойства с)ильтра у звена, стоящего между ними (рис. 18.32). Представим весь блок, вютючающий обе иелипейно-сти, изображеп1Н)1Й отдельно на рис. 18.33, как одно нелииейиое звепо. По отношению к нему система обладает 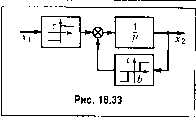 .г, =-{k2P + k)x, рХ2 =
(18.158) Чтобы пайти передаточную фу1И<:цию ьк)В010 нелинейного блока (рис. 18.33), оп-редели.м его выходной сигнал (/) при в.ходном сигпалех, = а s\u oit. Это представлено на рис. 18.34. Отсюда видно, что выходной сигнал Хо иредставляет собой ограниченные на уровне h треугольные колебания, отстаюпню но фа;зе от входного сигнала на угол Ф < п/2. Если вре.мя перехода выходного срп пала и.ч одного крайнего положения в другое составляет / , угол ф определяется соотнощением ф = - 2 т/2 С учетом того, что / = 2h/c, Т шЬ Ф = -. 271/со, гюлучае.м (18.1,59) Для того чтобы выходной си1нал достигал уровня ограниче1ШЯ (т. е. чтобы вторая нелинейность участвовала в работе), необходимо выполнение условия 71 со Таким обрезом, следует рассматривать входные сиг-палы с частотой со = (18.160) 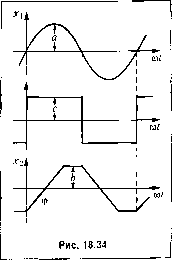 свойством фильтра. Следовательно, автоколеба1Н1я в системе можно искать приближенно в виде = а sin со/. Система уравнений, описывающих работу всей системы, имеет вид
|
||||||||||||||||||||||||||