
|
|
|
Главная -> Повышение запаса устойчивости 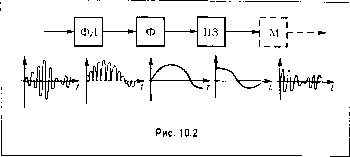 ствующих на огибающую модулированного сигнала, но ввиду их сложности и недостатков они пока почти не находят применения. При наличии модулиро-вашюго сигнала и при необходимости использования звеньев последовательного типа приходится устанавливать в канале переменного тока фазочувствительпый демодулятор. После выиря.млепия и фильтрации сигнала от высип1х rapMoiniK в этом случае появляется ж)зможиость ввести звено последовательного типа. Схе.ма введе11ия звена последовательного типа изображена для этого случая на рис. 10.2. Модулированный сигнал переменного тока поступает па фазочувствительный демодулятор ФД, затем после выпря.млеиия на фильтр Ф и далее па последовательное корректирующее звено из. В случае необходимости вести дальнейшее усиление на переменном токе после последовательного звена устанавливается модулятор М. Однако такой путь часто связан с серьезным ухудшением динамических свойств систе.мы вследствие влияния дополнительных постоянных времени фильтра, устанавливаемого на выходе демодулятора. Звенья параллельного типа удобно при.меиять в тех случаях, когда необходимо осуществить сложный алгоритм управления с введением интегралов и производных от сигнала ошибки. Примером этому может служить рассмотренный в предыдущей главе случай использования изодромных устройств. Обратные связи находят наиболее широкое примеиепие вследствие простоты технической реализации. Это объясняется тем обстоятельство.м, что на вход обратной связи поступает сигнал сравнительно высокого уровня, часто даже непосредственно с выхода систе.мы или выходного каскада усилителя. Другое ас менее важное обстоятельство заключается в том, что корректирующие устройства различного тина оказывают различное влияние па содержапн1еся в системе пелипейиости. Если обратная связь охват ывает участок канаста управления, содержапщй какую-либо нелинейность, naiipHMcp силы трения, люфт, зону нечувствительности и т. п., то влияние этой нелинейности па iipoTCKamie процессов в системе меняется суп1ествеппым образом. Отрицательные обратные связи имеют свойство уменьшать влияние пелипейиостей тех участков цепи, которые ими охватываются. Так как практически все систе.мы содержат те или иные нелинейности, ухудпшюпиге качество управления, то использование корректируюнгих устройств в виде отр11цательпых обратных связей, как правило, дает возможность добиться лучпн1х результатов по сравнению с ,тругими типами корректируюпшх устройств. Аналогичным образо.м отрицательные обратные связи дают значительно Лучишй эффект в тех случаях, когда вследствие воздействия впепитх факторов (вре.мя, температура и т. п.) меняется коэффициент усиления какой-либо части цепи, охватываемой отрицательной обратной связью. § 10.2. Последовательные корректирующие звенья Корректирующие звенья носледовательного тина могут составляться из различных но своей физической природе элементов: электрических, механических, гидравлических и т. д. Наиболее просто такие звенья могут быть составлены из электрических R-, С- и 1-элементов или реализованы на опорациоипых усилите;!ях. Электрические последовательные звенья имеют самое широкое распространение в системах автоматического управления, поэтому в дальпейн1ем они будут рассмотрены в первую очередь. Последовательные звенья из R-, С- и i-элемснтов часто назьшают нассивны.ми нос;1едовательными корректирующими устройства.мн, так как они не соде])жат источников электродвижущих сил. Суп1ествует весь.ма большое количество пассивных последовательных звеньев. В некоторых книгах и справочниках приводятся таблицы, содержанще схемы десятков и даже сотен звеньев ])азличиого вида. Обычно пассивные последовательные звенья могут быть представлены в виде обобп1енной схемы, изображенной на рис. 10.3. Функции Zf{p) и Z2(p) представляют собой сопротивления участков цени, .записанные в операто])пой форме. Влияние предыдущего и последующего звеньев на ])а-богу последовательного корректирующего звеьга может быть учтено введением сопротивления выхода источника сигнала R и сопротивления входа й . С учетом введенных сопротивлений передаточная функция последовательного звена будет е{р) K+z,{p)+-- (10.11) К + Ыр) В идеализированном случае, когда R О, а -> °°, ({юрмула (10. И) приобретает вид Е{р) ир) Z,{p) + Z2(p) 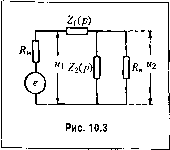 Передаточная функция (10.11), как правило, соответствует звенья.м с более плохими корректирую щи.ми свойствами по сравнению с (10.12). В табл. 10.1 приведены основные типы последовательных пасси1П1Ых .электрических корректирующих звеньев в соответствии с формулами (10.11) и (10.12). Пассивные дифференцируюиие звенья нодав;!Яют низкие частоты и вносят щ)ложнтельный фазовый сдвиг. Подавление низких частот обычно недопусти.мо. так как снижает коэффициент пе])елачи разомкнутой Таблица 10.1 № п/п Название и схема пассивного звена Передаточная функция Частотные характеристики Параметры Л. а. X. и л. ф. X. Дифференцирующее С,  7-2 = Г,-Я,С; \/ = arctg (оГ, - arctg (О Г2 Rf+Ri Т/ Io = 201gGo 7-,; -180 ,0 о - т. г. Лиффсренцирутщее  1 + Г2Р \/ = arctg (оГ, - arctg о)Г2 7-, = /?,С,; KRR.-- 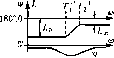 G = Io = 201gGo;I< = 20lgG, Интегрирующее 1 + ? 2Р у = arctg (о72 -arctg соГ, 7i ~ (Д, + Й2) Сг; Г2 = G= = Zk; I = 201gG -i80 ,0 Т. т;
|