
|
|
|
Главная -> Повышение запаса устойчивости F(x) ky signx. (18.83) Поскольку движение предполагается без остановок, то нелинейную функцию (18.83) подвергаем гармонической линеаризации, как релейную характеристику, и на ос11овании фор.мулы (18.18), полагая х = а sin ю/, иолучае.м (18.84) где а - амплитуда колебаний скорости х = рР; амплитуда колебаний самого угла Р при зто.м, очевидно, будет Р = -cosco ю Выражение (18.84) представляет собой известную формулу линеаризации сухого трения с иомоии>ю вибраций, Найде.м условия, ггри которых она здесь стграведлива. Согласно (18.81) и (18.82) имеем откуда
что и является условием, при котором справедливо дальнейшее решение. Характеристическое уравпение всей замкнутой системы согласно (18.82), (18.84) и (16.53) получает вид {Т,р + p + k т,р + 1)бР + k,k + (Г р + \){Т,р + \)р = 0. ла После подстановкир =/ю получаем 0)2=0, fAky па + k\ +1 ш-7;г,у =0. Чтобы исследовать влияние коэффициента к на динамику системы, выразим из этих двух уравнении величины к и а через ю: Ак-, я(Г ГХ-1-,б) (18.87) За.\гетнм, что а = °° ири (со ),. ----, Ф- \ о в./ Изменяя й), в интервале (ю ), < ю < + строим ио формулам (18.87) график а = !{к), представленный на рис, 18.16, б. Условие, ири котором справедливо это peinc-нис, было выражено неравсрютвом (18.85), Подставив в пего значения а = а и ю = ю из (18,87), приводим его к виду b-2U\ + k,k,) п>1, (18,89) b = 4l]+Ak,kTX-T . Для исследования устойчивости найденного периодического решения на основании (18,86) находим ЭX да >0, <0, <0, <0, Критерий (18.6.3) при этом не вьпю.пшстся, что означает неустойчивость найденного периодического ре1пения. Это и показано условно вертикальными стрелками на рис, 18,16,6. Легко проверить, что значение (18,88) совпадает с границей устойчивости ли- нейной системы без сухого трения. Следовательно, добавление сухого трения несколько распшряет область устойчивости системы, но весьма своеобразно, а и.\гсппо: неустойчивость найденного периодического решения означает, что при к > й р и при выполпении условия (18,89) система может быть устойчивой в малом (при начальных ус,;ювиях, которые дают начачьную амплитуду собственных колебаний системы в переходпо.м процессе, лежащую ниже кривой на рис, 18.16,6), Однако система неустойчива в большом (при начальных aилитyдax собственных колебаний выше этой кривой). Последнее можно об1>яспить физически тем, что при больших амплитудах и соответственно ири больших скоростях движения демпфирующее влияние силы сухого трения, которая сохраняет одну и ту же величину при любой скорости, становится несущественным, вследствие чего система оказывается неустойчивой, как и при отсутствии сухого трения. -со При певыполпсиии условия (18.89) требуется исследование обоих уравнений (16.52) coB.viecTHO (это будет уже нелинейность второго класса, так как OFia затрагивает обе величины: входную и выходную Р). При ;этом колебания угла Р будут происходить с остановками. Это - задача более сложная. Пример 3. Пусть теперь в той же систе.ме действует не сухое трение, а сопротивленне двпже1и1ю объекта, пропорцио-налыюе квадрату скорости, с линейной составляюн1ей (рис. 18.17, а). Уравнение управляе.мого объекта с двигателем имеет в этом случае вид (16.63). Перепишем .здесь его иначе но аналогии с предыдуиим при.меро.%г (Г /; +l)x-f(x) = ,/ х = рР, (18.90) 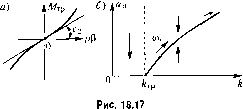 Полагая X = asin со, гю формулам гармонической линеаризации (18.10) получаем 9 = - ;fa2sin2\/(signsini/)sin\i/ d\\i = 1 fr Ч ; 1 Г / 2 Ч 1 8/ = -\ ki,(Г тг Ц1 а \\1--A-fjrt snr \/=- па ,i па i Следовательно, f(x) = Составив, как и раиьпге, характеристическое уравнение, приходим к выраже1гиям: а)2=0. ш-7;гу =0, (18,91) откуда находим; к = (ТМ +1), а, к, 8/?x (18.92)
|
||||||||||||||||||||||||||