
|
|
|
Главная -> Повышение запаса устойчивости окончательно получаем fit) = - С05ф---р (21.4) Подставив это выражение в заданное дифференциальное уравнение системы (21.2), получим Qkp)-S{p) СОКф---р x + R(p)F(x,px) = 0. (21.5) Таким образом, неоднородное нелинейное уравнение (21.2) при задатюм внешнем воздействии (21.1) и предполагаемой форме решении (21.3) сведено к однородпо-.му нелииейно.му уравнению (21.5), содержащему добавочный член в левой части. Уравнепие (21.5) аналогично прежнему уравнению (§ 18.2) и отличается от него только заменой (шераторного многочлена Q (р) на новый операторный м1югочлен, стоянщй в (21.5) в квадратных скобках. Применяя нри отыскании синусоидального периодического решения формально тот же .метод, что и в главе 18, нужно потребовать вьпюлне-пия свойства фильтра от этой новой системы. Заданная нелинейность f(x, рх) должна допускать симметричные колеба1Н1я, т. е. должно выполняться условие jf(flg.sinv, u! a) cos\/)(i\/ = 0. (21.6) Итак, получив для определения вынужде1Н1ых колебаний однородное уравнение (21.5), можно, как и в § 18.2, произвести гар.моническую линеаризацию пелипейности F(x, px) = qx +-рх, О),. (21.7) ЛЯ 1 F(a sin\/, й со cos\/)sin\/ir/\/, F(a sin\/, fl to cos\)j)cos\/J\;, Ii о (21.8) причем согласно (21.3) V == -t- ф. (21.9) что, однако, пе влияет на результат вычисления q и q. Поэто.му при определении симметричных однозначных вынужденных колебашн ! можно целиком пользоваться гого- выми выражениями для q и q. приведеииыми в главе 18, с заменой в них а, со иа а , со . Таким образом, для каждой нелинейности в общем случае получаются зависимости q (я, (0 ), q (о ), а во .многих частных случаях (см. главу 18) - q (а ), (7, (а ). (21.10) (21.11) В результате из (21 .,5) и (21.7) нолучае.м характеристическое уравнение для первого приближения Q(p)-5(p)- со.чф---р + R{p) q + --p = 0. (21.12) Подставляя сюда чисто мпи.мое значение р = Уо) , что соответствует отысканию синусоидального решения (21.3), получаем QCA) - (М,)-(ссхчф - ysin ф) + R{j(x\ )(q + jq) = 0. (21.13) -iif Замечая, что С03ф-7 31пф = <? из уравтюния (21.13) находим, что Я7Ч) Воз.можны два метода дальнейшего реп1еиия задачи. Эти методы остаются справедливыми и для нелинейных систем с вре.менным запаздыванием т, когда выражение (21.14) принимает вид (21.14) 5(;4) (21.15) или другой аналогичный вид, содержапнш т. Графический метод. Для каждого значения частоты ири заданных параметрах систе.мы на комплексной плоскости строится кривая (рис. 21.1) /(а ) = а Q04) + O..)(/+7V) .9(70) ) (21.16) .Эта кривая ссютветствует левой части равенства (21.14). 11равая же часть (21.14) изобразится в виде окружности радиуса В. Пересечение ее с кривой Z(ag) дает ркмпе-пие задачи, приче.м в точке пересечения но дуге окружности определяется фазовый сдвиг ф, а но кривой Z (а ) - величина амплитуды а вынужденных колебаний. Лиалогичмо решается з.1дача и н случае выражения (21.15). 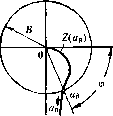 2(ав); При ралпых сОй или k 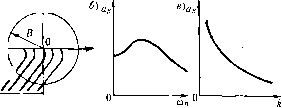 Рис. 21,1 Рис. 21.2 Зависимость амплитуды вынужденных колебатш от частоты а) (рис. 21.2, б) можно получить, если нарис, 21.1 начертить серию кривых Z(a ) при разных постоянных значениях (рис, 21.2, а). Таким же путем, строя кривые Z(aB) при разных постоянных значениях какого-нибудь пара.метра k (рис. 21.2, а), можно определить зависимость йв от любого параметра системы k (рис. 21.2, в), входящего в выражение (21.16) для Z(aJ. Для отыскания зависимости а от амплитуды внешнего воздействия В нужно нанести серию концентрических окружностей разных радиусов В (рис. 21.3, а). При этом возможны два случая: 1) когда имеется точка пересечения окружности с кривой Z(a ) при любой величине радиуса В, начиная от нуля, что дает зависимость (В), например, в виде рис. 21.3, б; 2) когда точка пересечения окружности с кривой 2(0) существует только при зпачепиях радиуса В, превышающих некоторое пороговое значение й р (рис. 21.3, а), что приводит к зависимости а (В) типа рис. 21.3, е. Графическое определение 5 р ясно из чертежа. Можно построить зависимость пороговой амплитуды В , р внешнего воздействия от частоты а) нри заданных параметрах системы (рис. 21.3, г) или от любого параметра k при данной частоте (а (рис, 21.3, д). Последнюю зависимость можно найти с помощью рис. 21.3, а, построенного для серии кривых Z (fifg), соответствующих различным k. Рассмотренный второй случай, когда система перехо- 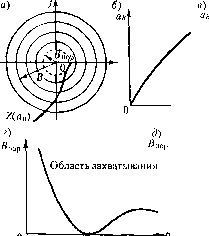 й О в, Область захватывания (йаит Область Область авто- устойчивости колебаний равновесия
|