
|
|
|
Главная -> Повышение запаса устойчивости Рассматривая характеристическое уравнеиие системы ТуТУ + {Ту + Т)р -p + K,Tj> + K,- О, можно убедиться, что в системе возможно получение устойчивости при выполпении условия Г (Г, + Г,)-(Г, + Г )2 - (9.16) К,<- y>.\\ ИЛИ в ином виде 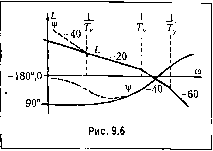 Ту + Т- (9.17) Нетрудно видеть, что при Т °° (это будет при отсутствии интегрирующего привода в изодромном механизме) условие устойчивости переходит в неравенство К< - +-, у м (9.18) которое справедливо для исходной схе.мы, изображенной иа рис. 6.4. При достаточно больших 311ачениях постоянной времени изодро.много .механизма Г , что соответствует .малому передаточному коэффициенту интегрирующего привода к = -, ус- ловия устойчивости (9.16) и (9.17) будут .мало отличаться от условия устойчивости (9.18) исходной схе.мы. Таким образом, введение изодромпого механи.зма с относительно большой постоянной вре.мени Г дает повьнпение порядка астатиз.ма па единицу ири воз.можности практически сохраги1Ть условия устойчивости в систе.ме, куда этот механизм вводится. Это обстоятельство можно проиллюстрировать также па логарифмических частотных характеристиках (рис. 9.6). В соответствии с выражением для передаточной функции разомкнутой системы (9.14) можно записать: i(a)) = 201g (9.19) (9.20) Ч/(со) = (-90° - arctg (оГу - arctg шТ ) - 90 -ь arctg шГ . Сравнивая эти выражения с формулами (9.6) и (9.7), справедливы.мп для исходной схемы, можно заметить, что ири относительно большо.м значении постоянной времени Г логарифмические характеристики системы с изодромтгым стройство.м будут и.меть отличие только в низкочастотной области при а)<-. Для частот (х - Т, и дополнительный множитель в (9.19) обращается в единицу, а дополнительный фагю- вый сдвиг в (9.20) равен нулю. Таким образом, при ш>7 логарифмические частот- ные характеристики системы с изодромпым устройством практически пе отличаются от логарифмических характеристик исходной схемьг В частности, в районе нуля децибел для л. а. X. можно получить одинаковый вид амплитудной и фазовой характеристик для обеих схем, что будет соответствовать одинаковому запасу устойчивости. На рис. 9.6 сплошны.ми линиями показаны л. а. х. и л. ф. х. для исходной схемы, а пунктирными - изменения, даваемые введением изодромного устройства с относительно больнгой постоянной времени. Следует заметить, что введение изодромного устройства с большой постоянной вре.мени образует систему, динамические качества которой .могут оказаться сравнительно низкими. Это объясняется тем, что введение такого устройства улучшает вид амплитудной характеристики только в низкочастотной области (рис. 9.6). В результате коэффициенты ошибки, следующие за те.м коэффициенто.м, который обращается в пуль, .могут не только пе уменьшиться, тю даже возрасти. В рассмотренном выше примере при введегии! изодромного устройства обратился в нуль коэффициент С] (9.15). Однако в следующие коэффициенты в качестве дели- теля входит добротность но ускорению =--. При большом значении постоян- ной времени Г добротность системы по ускорению получается малой и коэффициенты ошибок с- Сз,... сильно возрастают. Для дальнейшего повышения порядка астатизма систе.мы могут п])имсняться не один, а два, три и т. д. изодромных устройства. В этом случае можно получить гювы-шение порядка астатиз.ма на один, два, три и т. д. в зависимости от необходимости. На рис. 9.7 в качестве примера приведена структурная схема системы с тремя изод-ромными устройства.мн. Если исходная система имеет, например, астатизм первого порядка, то система рис. 9.7 с изодромными устройствами будет обладать астатиз-мом четвертого порядка. В этом случае для коэффициентов ошибок будет и.меть место равенство Сд = Cj = = С3 = 0. Как и ранее, при соответствующем выборе постоянных времени изодромш>1х устройств Г , =-, Tj,2 =- и 7 ,з =- можно сохранить 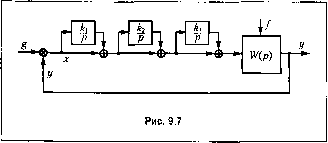 практически те же условия устойчивости, что и в исходной системе. Управление по производным от ошибки. В боль-пшпстве стучаев управление но производным от ошибки имеет целью повысить запас устойчивости системы, что позволяет увеличить коэф- Лиффьчюнцируютий элемент
Рис. 9.8 Рис. 9.9 фициент передачи разомкнутой системы и те.м са.мы.м улучиипь точность. Это будет рассмотрено более подробно в главе 10. Однако управление но производным от ошибки может са.мостоягельно повышать точность системы даже в том случае, когда сохраняется неизменным коэффициент передачи. Физика этого явления заключается в том, что при введении управлепи>; по производным система начинает чувствовать ие только наличие оншбки, но и тенденцию к изменению ее величины. В результате она более быстро реагирует на появление задаюпшх и возмущающих воздействий, что снижает опшбку. Структурная схема введения производной по ошибке и.зображена па рис. 9.8.11е-редаточная функция части прямого канала в.месте с включенпы.м дифференцирую-пшм элеме15том может быть представлена приближенно (в предположении, что диф-ферепцирующий э.темент является идеальным) в виде д(р)=1 + 7;р, (9.21; где Гд - постоянная времени дифференцирующей цепи. В качестве дифференцируюпщх элементов .могут, например, приме1гяться уст ронства, изображенные на рис, 4.20 и 4.21. Рассмотрим в качестве примера ту же следящую систему (рис. 6.4). При введениг производной от ошибки при помощи тахогенераторов, установленных на командно! и !1С1!ОЛ!!ителы!ой ОСЯХ, электромеха!!ическая схема будет иметь в!1Д, изображе!ГШ)!1 !ia рис. 9.9. Здесь !!ри!!ять! следую!![ие обоз!!ачения: СКВТ - синус!10-косинусн1)1( вращающиеся трансфор.матор!я, ТГ - тахогенераторы, Д - двигатель, р - ре;дуктор Передаточная фу!!К!щя разомкнутой системы может быть !!олучена умножени ем (9.1) на !!ерелаточную фу11К!шю (9.21). В резу.Ш)Тате !!Олучим К(\ + Т,р) р(1 + Г,я)(1 + Г,р) (9.22 где !!остоя!П1ая вре.ме!1Н Т, !1редста!У!яет собой от!10!пение передаточпо!-о коэффициент тахоге1!ератора к передаточному коэффицие!!ту чувс,Т!5ителы!01о элеме!!та (СКВТ), т. е. рад рад
|
||||||||||||