
|
|
|
Главная -> Повышение запаса устойчивости или после объединения некоторых уравнений (Г,р + 1) = Л- (6.86) Исключив отсюда переменные и т], приходим к одному дифференциальному уравнению данной систе.мы авто.матнческого управления: (7iV+?2/ + l)(7;P + l) которое преобразуется к виду (1 + Ье-) + -(!- Ье- ) +Ш + be ) \Ф = О, Y J (Т,р+Т2Р + ШР + ) + (т;р+т,р+\){т,р+1)+ Y + l Y-l (6.87) е-Р\ф = 0. Это уравнение имеет в основно.м тот же вид, что и уравнение системы с запаздыванием (напри.мер, (6.40)). Здесь оно определяет величину Ф, через которую затем находятся из вьппепаписаппых соотношений управляемая величина ф; и другие. Параметр т в этом уравнении согласно (6.82) и (6.,58) вычисляется по формуле х = 2. а (6.88) т. е. т есть удвоенное вре.мя прохождения звука в газе по данному трубопроводу. § 6.8. Устойчивость двумерных систем с антисимметричными связями В практике встречаются двумерные системы управления с аптисимметричпы.ми связями. Структурная схема такой системы изображена на рис. 6.29. Она содержит два идентичных канала с одинаковыми передаточными функциями W(,(j>) = W(p) V2(/) и антисн.мметричные связи. К такому виду сводятся некоторые гироскопические устройства, двухканальные системы слежения и др. Матрица-столбец выходных (управляемых) величии связана с матрицеГ1-столб-цом ошибок выражением = W{p)x. (6.89) Характеристическое уравнение замкнутой системы: \E + W{p)\= = (l + lУo) + Ж?=0. (6.90) Здесь E - единичная матрица 2x2. Для расчета устойчивости введем в рассмотрение ко.милсксные величины х = Х( + 7x2. (6.91) (6.92) Матричная зависимость (6.89) дает два равенства: y,=W{p)x,+aWQ{p)x2, z/2=-aWo(p)Xi+Wo(p)X2. Умножая второе равенство нау и складывая, нолучае.м для ко.мплексиых величин y*{\-}aW,{p)x=W,{p)x\ (6.93) Здесь введена эквивалентная передаточная функция разо.мкнутой двумерной системы Для .дальнейшего расчета может использоваться критерий Найквиста в своей обычной формулировке. Однако для построения а. ф. х. разомкнутой системы следует использовать частотную передаточную функцию W.Ow) = (l-7 )WoOw). Ее модуль (6,94) а фаза w,( i=Mo(; )l->/i. Жэ(м) = \/о(со) - arctg а. 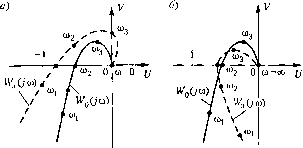 Рис. 6.30 По сравнению с исходной а, ф. x. Wq(jw) модуль увеличивается в раз и появляется дополнительный фазовый сдвиг а = -arctg а. Это означает, что каждая точка исходной а. ф. x. удаляется от начала координат и но-ворачивается но часовой стрелке, если а > О (рис. 6.30, а), и против часовой стрелки, если а < О (рис. 6.30, б). Заметим, что в случае перехода к комплексным вепгчинам у* и х* .можно произвести расчет по а. ф. х. исходной однокапальпой системы W()(;co). В этом случае колебательная граница устойчивости будет при выполнении условия W,(jb)-(l-ja)WQ(jo)--{. (6.95) Рассмотренный метод позволяет упростить определенные устойчивости двумерной системы по сравнению с использованне.м результирующего характеристического уравне[П1я (6.90), так как требуют рассмотрения передаточной функции Wip) одного изолированного канала. Глава 7 ПОСТРОЕНИЕ КРИВОЙ ПЕРЕХОДНОГО ПРОЦЕССА В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ §7.1. Общие соображения Дифференциальное уравнение обыкновенной линейной системы автоматического управления, записанное для ошибки управления, согласно (5.6) и.меет вид D{p)x{t) = Q(jj)g(t) + N(p)f(tl (7.1) где р-~ - алгебраический оператор дифференцирования; g{L) - задаюп1ее воздействие;/(г) - возму1цаюц1ее во.здействие. Решение линейного дифференциального уравие1И1я с постоянными коэффици-ента.ми (7.1) будет х(0=х (0+л- (0. (7.2)
|