
|
|
|
Главная -> Логарифмическое определение устойчивости W{p) = Найдем передаточные функции отдельных звеньев. Потенциометр. Считая потенциометр безынерционным звеном, получаем WAp) = = K (10.47) где ki - крутизна потенциометра . Усилитель. При безынерционном усилителе wap)- = h, (10.48) где к2 - коэффициент усиления по напряжению. Двигатель совместно с редуктором. Передаточная функция двигателя с редуктором в случае пренебрежения переходными процессами в обмотке управления имеет вид ()=7(Г) (10.49) где kg - коэффициент передачи двигателя совместно с редуктором по скоро-Г рад I сти - , а 2д - электромеханическая постоянная времени. Объект. Будем считать, что угловая скорость поворота объекта по курсу пропорциональна углу отклонения руля. Тогда угол поворота будет пропорционален интегралу от угла поворота руля по времени. При учете инерционности объекта его передаточная функция будет иметь г 1 1 где А;4 - коэффициент передачи объекта - , То - постоянная времени объекта. Передаточная функция разомкнутой системы W (р) = W, (р) (р) (р) W, ip) = p.,rirop) (10-1) Г 1 i где К - общий коэффициент усиления разомкнутой системы. Найдем характеристическое уравнение системы 1 + W{p) = 0. (10.52) После подстановки получаем Т ТоР + (Г + Го) р + р + К = 0. (10.53) тор. При отклонении объекта от заданного курса на угол а движок потенциометра отклоняется на тот же угол. В результате на усилитель поступает напряжение. Пройдя усилитель, это напряжение поступает на двигатель, и руль объекта начинает поворачиваться. Составим передаточную функцию разомкнутой системы. Для этой цели отсоединим гироскоп направления от объекта и введем обозначения: ocj - угол отклонения гироскопа и 2 - угол поворота объекта (в замкнутой системе ocj = txg = ос)- Передаточная функция разомкнутой системы Достаточно одного взгляда на это уравнение, чтобы убедиться в неустойчивости системы при любом коэффициенте усиления К. Это вытекает из того что в характеристическом уравнении отсутствует член с оператором в первой степени. Такая неустойчивость называется структурной неустойчивостью, так как при данной структуре изменение параметров схемы любым образом не дает устойчивости. На рис. 10.19 изображена амплитудно-фазовая характеристика, соответствующая передаточной функции разомкнутой системы (10.51). Из вида характеристики вытекает, что устойчивость может быть достигнута только при закручивании высокочастотной части годографа против часовой стрелки, что показано на рис. 10.19 пунктиром. Только в этом случае амплитудно-фазовая характеристика не будет охватывать точку (-1, /0) и замкнутая 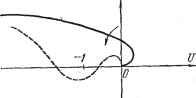 Рис. 10.19. Рис. 10.20. система окажется устойчивой. Для введения положительного фазового сдвига необходимо применить демпфирование с поднятием высоких частот, что достигается включением звеньев дифференцирующего типа. На рис. 10.20 изображена схема использования в качестве чувствительного элемента кроме гироскопа направления ГН дополнительного дифференцирующего гироскопа - гиротахометра ГТ. Угол поворота движка потенциометра /Zg можно считать пропорциональным угловой скорости а поворота гиротахометра. В результате вместо (10.41) будем иметь Wi (р) = = ki + hp = h (1 + TPh где постоянная времени = . Передаточная функция разомкнутой системы W (р) = Wi (р) W, (р) W, (р) W, (р) К(1 + Тр) (10.54) (10.55) Характеристическое уравнение системы (10.72) в этом случае уже не имеет пропуска членов: ГдГоР* + (Г + То) р+Р + КТ -\-K = Q, (10.56) и при соответствующем выборе постоянной времени коррекции Tvi общего коэффициента усиления в системе может быть получена устойчивая работа. 2. Следящая система. Схема следящей системы без корректирующих средств изображена на рис. 6.4. В этом случае предельная добротность по скорости из условия устойчивости определяется неравенством, полученным в § 6.2: K<i--Н т~ Рассмотрим случай демпфирования с поднятием верхних частот. Включим последовательно в канал усиления (рис. 10.21) пассивное дифференци- рующее звено ПЗ с передаточной функцией (10.57) Со==2-<1. Будем считать, что затухание Gp, вносимое звеном на низких частотах, компенсируется соответствующим увеличением коэффициента усиления СКВТ~2 да Рис. 10.21. усилителя. Тогда передаточная функция разомкнутой системы, полученная в § 6.2: примет вид W{p) р(1+ГуР)(1+ад (10.581 Примем теперь, что в использованном пассивном звене выполнено условие Ti = Гм. Тогда вместо (10.58) получим (10.59) ~ Р(1+ГуР) (1+СоГмР> Найдем характеристическое уравнение 1 + W(p) = 0. Подстановка выражения для передаточной функции (10.59) приводит к уравнению GoTyT p + {Ту + СоГм) р + Р + = 0. (10.60) Условие устойчивости (10.61) Нетрудно видеть, что, уменьшая коэффициент Go, можно получить устойчивость при любом значении добротности следящей системы. Рассмотрим теперь случай демпфирования с подавлением средних частот той же следящей системы (см. рис. 6.4). Для этой цели охватим часть усилителя, содержащую инерционность, гибкой отрицательной обратной связью (рис. 10.22, а). Согласно табл. 10.4 это эквивалентно включению последовательного интегро-дифференцирующего звена, обладающего свойством цодав лять средние частоты. .
|