
|
|
|
Главная -> Логарифмическое определение устойчивости Л ((D) = 1/ 1 -h Y1 + юГ 1(10.42) Реализация дифференцирующего звена, близкого к идеальному, может быть осуществлена, например, при использовании в следящей системе воспроизведения угла тахогенераторов. Этот случай будет описан ниже при рассмотрении конкретного примера. Хорошие результаты дает также применение гиротахометров и дифференцирующих операционных усилителей. В системах автоматического регулирования наиболее часто употребляются пассивные дифференцирующие звенья, подобные рассмотренньш в § 10.2 (см. табл. 10.1). Однако из табл. 10.1 следует, что положительный фазовый сдвиг, вносится этими звеньями не за счет поднятия высоких, а за счет подавления низких частот. Это вытекает из вида их передаточной функции: в установившемся состоянии коэффициент передачи звена Gq <; 1. Поэтому введение такого звена в канал регулирования снижает общий коэффициент усиления разомкнутой цепи в Go раз. С точки зрения выполнения требований по точности допустить такое снижение коэффициента усиления нельзя. Поэтому одновременно с включением в цепь пассивного дифференцирующего звена необходимо предусмотреть восстановление прежнего коэффициента усиления при помощи введения дополнительного усилителя или поднятия коэффициента усиления имеющегося усилителя. В результате общая передаточная функция пассивного дифференцирующего звена вместе с дополнительным усилителем будет иметь вид к(Р)=4тё? (>)- (i-) Дополнительный фазовый сдвиг ф = arctg (йГ1 -arctg юГа>0. (10.45) Модуль частотной передаточной функции в этом случае Л( ,) = Д (10.46) показывает на поднятие высоких частот. При © = О коэффициент передачи А (0) = 1, и при © -> оо имеем А (оо) = - > 1. Логарифмические частотные характеристики пассивного дифференцирующего звена совместно с дополнительным усилителем, компенсирующим затухание, вносимое звеном на низких частотах, изображены на рис. 10.16. В случае, если положительный фазовый сдвиг, вносимый дифференцирующим звеном, является недостаточным для выведения амплитудно-фазовой характеристики из запретной зоны, могут применяться два дифференцирующих звена, включенных последовательно, что соответствует введению первой и второй производных от сигнала ошибки. Для идеальных дифференцирующих звеньев передаточная функция будет иметь вид] W (р) = (i + Tip) (1 -f Тр) iap + Ър\ (10.40) Дополнительный фазовый сдвиг в этом случае будет ф = arctg (uTi -h arctg аТ. (10.41) Поднятие высоких частот будет здесь еще более заметным, так как модуль частотной передаточной функции этих звеньев Ч80°0- 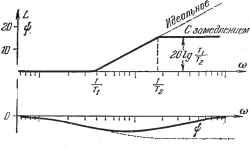 -90- +90- Рис. 10.16. Здесь же пунктиром изображены характеристики идеального дифференцирующего звена, имеющего передаточную функцию вида (10.37). Как видно из сравнения этих характеристик, пассивное звено, в отличие от идеального, дает положительный фазовый сдвиг в ограниченной области частот при ограниченном поднятии высоких частот. Аналогичный эффект дает применение отрицательных обратных связей, содержащих апериодическое звено (табл 10.4). Характеристика, подобная изображенной на рис. 10.16, может быть получена также при использовании активного дифференцирующего звена, состоящего из операционного усилителя (в режиме дифференцирования), включенного параллельно основному каналу регулирования в соответствии со схемой, изображенной на рис. 10.6. Демпфирование посредством поднятия высоких частот или, соответственно, введение упреждения по фазе является универсальным методом, так как позволяет получить требуемый результат практически при любых передаточных функциях исходной системы, в том числе и при наличии вка-нале регулирования неминимально-фазовых звеньев. Однако это не означает, что данный метод может быть рекомендован для использования во всех случаях. Поднятие верхних частот расширяет полосу пропускания системы, что приводит к увеличению ее быстродействия и одновременно усиливает влияние на систему высокочастотных помех. При большом уровне помех на входе или в канале регулирования поднятие верхних частот может привести к неприемлемым результатам. Поэтому данный метод демпфирования имеет ограниченную сферу применения. Она определяется, в основном, теми случаями, когда введение положительного фазового сдвига является принципиально необходимым для получения устойчивой работы, а также теми случаями, когда необходимо повысить быстродействие системы при допустимости возрастания влияния высокочастотных помех. В некоторых случаях при поднятии верхних частот приходится предусматривать меры одновременного подавления высокочастотных помех путем введения специальных узко- или широкополосных фильтров Иногда задача может оказаться вследствие этого весьма сложной. Демпфирование с подавлением средних частот. Выведение амплитуднофазовой характеристики из запретной зоны (рис. 10.17) может быть произведено при помощи подавления усиления в области частот, соответствующей отрезку характеристики между точками а ж Ъ. Ъ результате будет получена характеристика, изображенная на рис. 10.17 пунктиром. Подавление средних частот может быть осуществлено включением в цепь регулирования последовательного интегро-дифференцирующего звена (табл. 10.1), имеющего л. а. х., изображенную там же. Из вида л. а. х. M=const 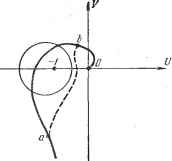 Рис. 10.17.
Рис. 10.18. направления, показывающий отклонение движущегося объекта от заданного курса; П - потенциометр; Д - двигатель рулевого устройства шР - редук- вытекает, что звено подавляет усиление в некоторой области средних частот. Вместо пассивного интегро-дифференцирующего звена могут применяться его эквиваленты, например гибкая отрицательная обратная связь, охватывающая инерционный усилитель (табл. 10.4). По своим свойствам демпфирование с подавлением средних частот занимает промежуточное положение между двумя рассмотренными методами. При демпфировании с подавлением средних частот сохраняется быстродействие системы и сохраняется полоса пропускания. Этот вид демпфирования является наиболее распространенным. Демпфирование с введением отрицательных фазовых сдвигов. Сущность этого метода можно уяснить, например, из рассмотрения рис. 6.22. На рис. 6.22, б изображен случай, когда из-за наличия в канале разомкнутой системы консервативного звена, имеющего чисто мнимые полюсы, замкнутая система будет неустойчивой. Добавление отрицательного фазового сдвига вызовет закручивание а. ф. х. по часовой стрелке. В результате система в замкнутом состоянии может быть сделана устойчивой (рис. 6.22, а). Введение отрицательного фазового сдвига производится использованием последовательных корректирующих звеньев фазосдвигающего типа (табл. 10.1). Так как подобные звенья оказываются обычно неминимально-фазовыми, то такой метод демпфирования иногда называют в литературе методом демпфирования с использованием неминимально-фазовых звеньев. Демпфирование с введением отрицательных фазовых сдвигов оказывается эффективным в случае наличия в канале разомкнутой системы консервативных, а также колебательных звеньев со слабым демпфированием. В первом случае это приводит к появлению в амплитудной частотной характеристике (или в л. а. X.) резонансных пиков бесконечной высоты, а во втором - к резонансным пикам конечной, но значительной высоты. Использование демпфирования других типов здесь оказывается затруднительным. По своим свойствам этот метод демпфирования сходен со случаем подавления средних частот, так как фазосдвигающие звенья обычно не вносят изменений в амплитудную частотную характеристику и модуль их частотной передаточной функции W ij) I = 1. В результате сохраняется быстродействие демпфируемой системы и сохраняется ее полоса пропускания. Рассмотренные выше методы демпфирования систем регулирования являются основными, но лишь иллюстрируют те идеи, которые используются для повышения запаса устойчивости. В практике, в зависимости от конкретных условий, могут использоваться и более сложные изменения динамических свойств системы регулирования. Так, например, может осуществляться подавление средних частот с одновременным поднятием высоких, поднятие высоких частот с подавлением их некоторой области (фильтрация определенных частот) и т. п. § 10.6. Примеры 1. Система управления движущимся объектом. Рассмотрим систему управления, изображенную на рис. 10.18. Здесь обозначено: - гироскоп
|