
|
|
|
Главная -> Логарифмическое определение устойчивости Эквивалентная передаточная функция разомкнутой системы Условие полной инвариантности (9.39) (9.40) В качестве примера рассмотрим следящую систему (см- рис 6.4) при введении регулирования по первой производной от угла поворота командной >
Лет P(f+Typ)(t+T p) Рис, 9.12. оси, которое осуществляется при помощи тахогенератора. Электромеханическая и структурная схемы для этого случая изображены на рис. 9.12. В соответствии с общим случаем, изображенным на рис. 9.11, имеем: {р)-=кр, Wi(p)k, (/) = Эквивалентная передаточная функция замкнутой системы (9.37) Фэ {Р) ТуТР+(Ту+Т)р + Р+К где = ~ - постоянная времени цепи первой производной от угла пово- рота командной оси. Эквивалентная передаточная функция по ошибке (9.38) Ф э {р) = TyV+{Ty-\-T)P+P+K Скоростная ошибка будет равна нулю в том случае, когда в числителе последнего выражения будет равен нулю коэффициент при операторе в первой степени. Отсюда получаем условие частичной инвариантности (ликвидация скоростной ошибки): Ti = -i-. (9.41) Из (9.39) можно найти эквивалентную передаточную функцию разомкнутой системы: При выполнении условия (9.41) эквивалентная передаточная функция разомкнутой системы будет соответствовать астатизму второго порядка: W (г,\ K(i+XiP) Ze(l + TtP) УУэ(Р) (Ту+Т) p+TyTpS Pi + ToP) где Кг = -j-r--добротность системы по ускорению, Гд = Гу + П Гу+Гм эквивалентная постоянная времени. В качестве второго примера рассмотрим инерциальную вертикаль (рис. 9.13, а). Принцип работы ее заключается в том, что акселерометр А воспринимает ускорение перемещения подвижного объекта, на котором установлена стабилизированная платформа (С/7), и составляющую ускорения силы тяжести, возникающую при наклоне этой платформы на некоторый угол а (ошибка вертикали). Таким образом, акселерометр определяет ускорение а = ga + Rpei, (9.42) где g - ускорение силы тяжести, R - радиус Земли, Oi - путь, пройденный объектом по Земле, в дуговых единицах. Это ускорение дважды интегрируется и поступает на стабилизированную платформу, которая поворачивается на угол 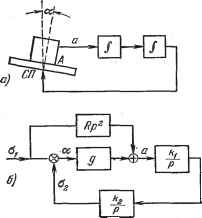 0-2 = - (9.43) Рис. 9.13. где и /сг - коэффициенты передачи первого и второго интеграторов. К этим двум уравнениям необходимо добавить связь между ошибкой вертикали а, пройденным путем в дуговых единицах о и углом поворота стабилизированной платформы а- а = oi - Og (9.44) Для рассмотренных уравнений (9.42) - (9.44) инерциальной вертикали изобразим структурную схему (рис. 9.13, б). Сравнивая ее с рис. 9.11, можем записать: Ф (р) = Rp\ w, {p)==g, wAp)--. Условие полной инвариантности (9.40) (9.45) (9.46) (9.47) Ч>(Р) WlP) от1суда следует, что должно быть выполнено равенство kjc = . Тогда передаточная функция разомкнутой системы W{p) = W,{p)W2{p)-J, (9.48)
где Qo - частота незатухающ;их колебаний Рис. 9.14. инерциальной вертикали, которой соответ- ствует период jTq ~ 84,6 мин, называемый периодом Шулера. При наличии ненулевых начальных условий в системе будут устанавливаться незатухающие колебания с частотой Qq, что будет нарушать работу вертикали. Комбинированное управление может быть использовано также для снижения ошибки от возмущающего воздействия (рис. 9.14). В этом случае наряду с регулированием по отклонению х (t) используется регулирование по возмущающему воздействию / {t). Передаточная функция по возмущению здесь будет иметь вид <Ай-Щ0§Р. (9.51) где Wp (р) - передаточная функция по данному возмущению в разомкнутой системе, W (р) - передаточная функция разомкнутой системы. Условие полной инвариантности может быть получено, если положить Фр (р) = 0. Тогда . (р)-- (9-52) Эта функция также может быть представлена в виде ряда, аналогично формуле (9.36): Ф (р) = кр ( о + + тр + г1р + . . .), (9.53) где ао - безразмерное число (1 или 0), а кр - некоторый коэффициент, размерность которого совпадает с размерностью передаточной функции Wp (р). Как и в случае использования регулирования по задающему воздействию, получение полной инвариантности затрудняется необходимостью вводить первую и более высокие производные от возмущения / (t). Поэтому используется, как правило, частичная инвариантность, получающаяся при реализации в системе регулирования первых членов разложения (9.53). Это в свою очередь дает обращение в нуль соответствующих первых коэффициентов ошибки по возмущению (Cq, q, и т. д.). В заключение заметим, что возможно использование комбинированных систем с введением регулирования по нескольким возмущающим воздействиям и получением полной или частичной инвариантности по каждому из них. Однако это приводит, конечно, к усложнению схемы. а передаточная функция по ошибке будет тождественно равна нулю: Фжэ (р) = 0. Следовательно, при любых движениях объекта, на котором установлена инерциальная вертикаль, ошибка вертикали будет равна нулю. Это будет справедливым в том случае, если выполнены нулевые начальные условия, т. е. отсутствует свободное движение вертикали под действием начальных условий, и в случае, когда можно считать, что достаточно точно выполняется требуемое условие кк = . Заметим, что в рассмотренном случае особенно важно иметь нулевые начальные условия вследствие того, что передаточной функции (9.48) соответствует характеристическое уравнение P + -jf-=0. (9.49) Оно имеет чисто мнимые корни A.2 = ±7/=±jfio, (9.50)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||