
|
|
|
Главная -> Логарифмическое определение устойчивости работы вьшислительного устройства подбирается обычно так, чтобы дискретность его действия не влияла на работу системы в целом, т. е. чтобы запаздывание (время операции вычисления) было небольшим, а частота следования импульсов была достаточно высокой. Учитывать дискретность системы всегда необходимо для определения допустимой ее величины. При достаточно высоком темпе работы цифрового вьшислительного устройства (по сравнению с инерционностью системы) во многих случаях можно производить расчет системы в целом как непрерывной. Вообще же цифровые системы автоматического регулирования относятся к особому классу систем и их теория рассматривается отдельно от других. Релейные системы автоматического регулирования можно отнести, как и импульсные, описанные выше, к категории систем прерывистого действия, но их существенное отличие от импульсных систем заключается в том, что релейные системы по самому принципу своему являются нелинейными системами. Дело в том, что здесь моменты времени, в которые происходит замыкание и размыкание системы, заранее неизвестны; они не задаются извне, а определяются внутренними свойствами самой системы (ее структурой и величинами ее параметров). Этим обусловливаются и основные специфические особенности динамики процессов регулирования в релейных системах. В качестве первого примера релейной системы рассмотрим систему регулирования температуры примерно той же структуры, как на рис. 1.27, но с тем отличием, что вместо импульсного звена для управления работой привода нпорок в ней поставлено релейное звено -- в данном случае поля- 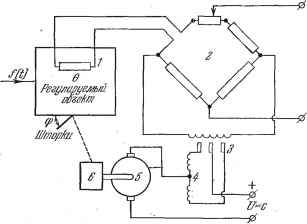 Рис. 1.35. ризованное реле 3 (рис. 1.35). Его средний контакт в зависимости от знака тока в диагонали моста 2, т. -е. в зависимости от знака отклонения регулируемой величины е, замыкается с правым или левым контактом, включая ток либо в одну, либо в другую обмотку возбуждения двигателя, в результате чего получаем либо одно, либо другое направление движения шторок на регулируемом объекте. Из сети в управляемую цепь реле (цепь контактов) подается постоянное напряжение U = с. Напряжение f/, питающее двигатель, изменяется в зависимости от величины тока / в диагонали моста по одному из законов, изобра-
женных на рис. 1.36. Нейтральному положению среднего контакта реле соответствует значение С/ = О при малых величинах тока - 6 < / < 6 (рис. 1.36, а). При некоторой величине тока / = 6 реле срабатывает, включая напряжение U = съ одну из обмоток двигателя. При обратном направлении тока /, которое считается отрицательным, будет та же картина срабатывания при / = - Ъ, причем то же самое напряжение U включается в другую обмотку двигателя и задает ему другое направление вращения. Это направление будем считать отрицательным и поэтому напряжение в этом случае будем отмечать знаком минус: U = - с (рис. 1.36, а). Интервал - fe / 6, где С/ = О, называется зоной нечувствительности реле. Показанная зависимость выходной величины реле U от входной / называется статической характеристикой реле. Как известно, величина тока срабатывания реле не совпадает с величиной тока отпускания. При учете этого обстоятельства получаем петлевую статическую характеристику (рис. 1.36, б), где 2 - величина Zl 1/ тока срабатывания, & - тока aj + отпускания. Эта петля аналогична той, которая получается при гис- j 2 ГТТ4 терезисных явлениях. Поэтому и в данном случае ее называют гис-терезисной петлей. Если петля не широка, то ею часто можно пренебрегать. Зона нечувствительности реле, имеющая место в этих двух статических характеристиках, получается в том случае, когда средний контакт поляризованного Рис. 1.36. реле обладает нейтральным положением. Если этого нет, то он будет сразу перескакивать из одного крайнего положения в другое (рисунок 1.36, в). Это - идеальная релейная характеристика без зоны нечувствительности и без петли. Реальная характеристика реле и в данном случае тоже будет иметь петлю (рис. 1.36, г), половину ширины которой обозначаем через Ъ. Это - характеристика реле с петлей без зоны нечувствительности, т. е. без среднего нейтрального положения. В приведенном примере в релейную систему входило электромагнитное реле, управляющее работой привода регулирующего органа. Однако к релейным системам регулирования и управления относятся не только системы, содержащие именно реле, а всякие системы, в составе которых есть звенья (любой физической природы), обладающие статическими характеристиками релейного типа, когда выходная величина звена изменяется скачкообразно при непрерывном изменении входной величины. Например, если в пневматической системе управления курсом водяной торпеды (рис. 1.20) открытие заслонки происходит достаточно быстро, то статическая характеристика работы заслонки будет релейная, как показано на рис. 1.37, где у - угол поворота заслонки, передаваеьшй от гироскопа, & р - давление воздуха. В этой системе заслонка играет ту же роль, что электромагнитное реле в первом примере. Возможно и другое рассмотрение данной пневматической системы. Предположим, что поршень рулевой машинки S (рис. 1.20) очень быстро по сравнению с поворотом самой торпеды перебрасывается из одного край-HOFO положения в другое при открытии заслонки и остается достаточно длительное время в крайнем положении, пока не поступит сигнал обратного знака. Тогда можно сразу изобразить характеристику всего регулятора в релейном виде, показанном на рис. 1.38. Последний случай отличается от предыдущих двух тем, что здесь сам регулирующий орган работает в релейном режиме, а там было релейное-управление привода регулирующего органа. Это - два наиболее распространенные типа релейных автоматических систем. Приведем еще более типичный пример такой релейной системы, в которой сам регулирующий орган работает в релейном режиме (двухпозицион-ном). Это - система регулирования скорости со электродвигателя (рис. 1.39).. Чувствительный элемент (центробежный механизм 1) дает непрерывное перемещение муфты s. В некотором среднем положении, которое примем за начало отсчета s, муфта нажимает на контакт 2 (регулирующий орган), заьшкая его. При разомкнутом контакте 2 в цепь возбуждения регулируемого двигателя О включено добавочное сопро тивление При замкнутом контакте 2 оно выключено, так как цепь возбуждения замыкается параллельно этому сопротивлению. Поэтому статическая характеристика регулирующего органа 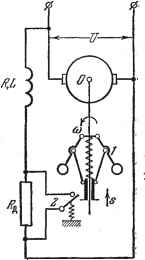 Рис. 1.37. Рис. 1.38. Рис. 1.39. будет иметь вид, показанный на рис. 1.40 без петли (а) или с петлей (б) в зависимости от качества контактной пары. Другим типичным примером двухпозиционного релейного регулирования (с релейньш режимом работы регулирующего органа) является вибрационное регулирование напря- Рис.Ч.40. . f с жения на клеммах генератора ♦ постоянного тока, применяемое- на автомобилях, самолетах и т. п. Принципиальная схема показана на рис. 1.41. Регулируемая величина - напряжение и. При отклонении напряжения изменяется ток в обмотке электромагнита. Это создает изменение тяговой силы элек-; тромагнита. При уменьшении последней пружина замыкает контакты К, выключая добавочное сопротивление из цепи возбуждения генератора. Следовательно, регулирующий орган (контакты) здесь будет иметь релейную характеристику, показанную на рис. 1.42.
|
|||||||||||||||||||||||||||||||||||||