
|
|
|
Главная -> Логарифмическое определение устойчивости Измерительное устройство регулятора состоит из термометра сопротивления i, включенного в качестве одного из плеч моста 2, и гальванометра Зу измеряющего ток в диагонали моста. Мост 2 настраивается так, что при заданной температуре, которую надо поддерживать неизменной, ток в диагонали моста отсутствует. Таким образом, измерительное устройство {1, 2, 3) регулятора дает на выходе перемещение стрелки s, пропорциональное отклонению температуры 6.  Рис. 1.28. Стрелка скользит по потенциометру 4, управляющему работой двигателя 5. Якорь двигателя питается через потенциометр (иногда дополненный усилителем). Двигатель 5 через редуктор 6 вращает шторки. Существенным недостатком данной конкретной системы является то что стрелка гальванометра 3 имеет значительную механическую нагрузку 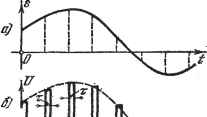 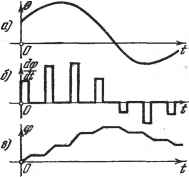 Рис. 1.29. Рис. 1.30. в виде трения об обмотку потенциометра. Это заметно снижает чувствительность измерителя, а значит, и всего регулятора к малым отклонениям регулируемой величины е. Целесообразно было бы предоставить стрелке гальванометра возможность двигаться свободно без нагрузки. Это делается следующим образом. На рис. 1.28 изображен вид на стрелку гальванометра 3 с торца (с носика). Носик стрелки движется вправо и влево свободно, не прикасаясь к обмотке потенциометра. Над стрелкой помещена так называемая падающая дужка ПД, опирающаяся на эксцентрик, который вращается с постоянной угловой скоростью (0. Когда падающая дужка приходит в нижнее положение, она прижимает стрелку гальванометра 3 к обмотке потенциометра 4 на короткое время. В течение остального периода колебаний дужки стрелка 3 свободна. В результате при непрерывном перемещении стрелки s напряжение U, питающее цепь якоря двигателя, будет подаваться с потенциометра в виде коротких импульсов (рис. 1.29). Постоянный период чередования импульсов Т задается системе принудительно извне и определяется величиной угловой скорости со вращения -эксцентрика независимым от данной системы приводом. Длительность импульсов т тоже постоянна. Поскольку перемещение стрелки s пропорционально отклонению регулируемой температуры 6, а скорость вращения вала электродвигателя dxfldt примерно пропорциональна питающему напряжению U, то в первом приближении получается импульсная зависимость скорости вращения привода регулирующего органа от отклонения регулируемой величины, показанная на рис. 1.30, б. Там же изображен вытекающий отсюда закон .движения самого регулирующего органа - перемещение шторок ф (t). В первом приближении они равномерно движутся во время подачи импульса и затем стоят на месте в промежутке между импульсами. На самом же деле, конечно, за счет инерционности двигателя при подаче импульса напряжения нарастание и убывание скорости dldt будет проис-эсодить не мгновенно, как на рис. 1.30, б, а по некоторой кривой (рис. 1.31, а). 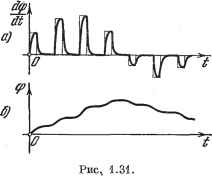 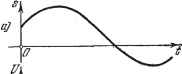 Рис.;;1.32. Поэтому регулирующее воздействие ф (f) на объект со стороны реального жмпульсного регулятора будет иметь несколько сглаженный вид (рис.1.31, б). Отсюда видно, что необходимо разумно выбирать величины периода чередования Т и длительности т импульсов, с учетом инерционности выхода из импульсного звена, в данном случае - инерционности разгона и остановки (или, как говорят, приемистости ) двигателя. Существуют, конечно, и другие, не менее важные условия для выбора Гит. Всякое устройство, которое осуществляет указанное на рис. 1.29 преобразование непрерывной входной величины (в данном случае s) в дискретную импульсную величину (fj), т. е. в последовательность импульсов с постоянным периодом их чередования, называется импульсным звеном. В данном примере было рассмотрено механическое испульсное звено с электрическим выходом. Вообще в других автоматических системах оно может осуществляться и чисто электрическими и электронными устройствами, в особенности там, где требуется малый период Т чередования импульсов (с другим входом, с менее инерционным выходом и для других объектов). Импульсное звено, осуществляющее указанное на рис. 1.29 преобразование величин, называется импульсным звеном типа 1. Применяется также и другое импульсное звено - типа 2, осуществляющее показанное на рис. 1.32 преобразование, при котором величина импульсов и постоянна, но зато длительность их т переменна и пропорциональна значению входной величины s в момент начала импульса, причем период чередования импульсов Т остается по-прежнему постоянным. Импульсное звено типа 2 можно осуществить, например, в той же системе регулирования температуры с помощью падающей дужки, имеющей наклонные вырезы, заменив потенциометр на контактные пластины {рис. 1.33), или с помощью специальных электрических схем. Основной смысл введения импульсного звена в системах автоматического регулирования заключается в освобождении измерительного устройства регулятора от нагрузки на его выходе. Это позволяет применить более точное и тонкое маломощное устройство для измерения отклонения регулируемой величины, т. е. улучшает реакцию регулятора на это отклонение с обеспечением в то же время достаточной мощности регулирующего воздействия на объект. Кроме того, при импульсном режиме уменьшается расход энергии на привод регулирующего органа. В других системах (например, в системах телеуправления и телеизмерения) импульсный режим может быть полезен также с точки зрения удобства построения многоканальных схем и т. п. К дискретным системам относятся системы автоматического управления и регулирования в тех случаях, когда в замкнутый контур системы включается цифровое вычислительное устройство. Это устройство бывает необходимо в тех случаях, когда, например, измерительные приборы в системе управления не могут измерить непосредственно отклонение регулируемой величины от требуемого (программного) значения, а оно должно вьгтисляться по определенным формулам через показания измерительных приборов. 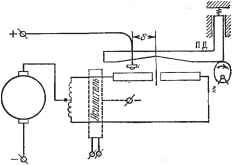 u)=msi Рис. 1.33. ffcmpeijameo Цифровое Bb/VliC U- тельнае 1/страг}ства Усшшелмо-лреораза-еатемше ycmpedcmea tfcmwa телбте ffcmpalfemee Рис. 1.34. В других случаях цифровое устройство может служить для вычисления не только отклонения, но и самого программного значения регулируемой величины по каким-либо критериям наилучшего качества работы данной системы. Цифровое устройство может выполнять и другие весьма разнообразные функции. Система регулирования или управления в этих случаях будет работать как дискретная, потому что цифровое устройство выдает результат вычисления дискретно, т. е. в виде импульсов через некоторые промежутки времени, необходимые для производства вычисления. Включение цифрового вьгтислительного устройства в контур системы управления сопряжено с преобразованием непрерывных величин в дискретные на входе и с обратньш преобразованием на выходе (рис. 1.34). Темп
|
||||||||||||||||||