
|
|
|
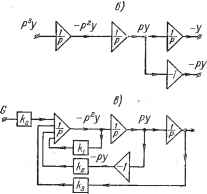
Главная -> Логарифмическое определение устойчивости Знак минус в формуле (7.58) показывает, что операционный усилитель инвертирует входной сигнал (меняет его знак). Это связано с установкой в усилителе нечетного числа каскадов. Рассмотрим три основных режима работы усилителя. 1. При Zg (р) = и Zi (р) = Ri усилитель выполняет функцию умножения входной величины на постоянный множитель (рис. 7.6, а): ip) = {р) == ~hU, Лр)- (7.59) --Bxv/y----- Упрощенное изображение такого усилителя показано на рис. 7.6, а справа. 2. При Zq (/?)=- , что соответствует установке в цепи обратной связи конденсатора, ш Zi (р) = R усилитель работает в режиме интегрирования входной величины (рис. 7.6, б): > tBbix ip) = t/Bx(p) = = -t/Bx(p). (7.60) > 11 Hb Два варианта упрощенного изображения такого усилителя I-ц-. изображены на рис. 7.6, б К, справа. /? i - L11£J />- 3. При Zo = R ш Ziip) = = -у;, ЧТО соответствует уста- новке конденсатора во входной цепи, усилитель работает в режиме дифференцирования (рис. 7.6, в): г7вых(р)=~адг7вх(р) = = ~kspU{p)- (7-61) Упрощенное изображение такого усилителя показано на рис. 7.6, в справа. Рис. 7.6. Режим дифференцирования обычно не используют при моделировании, так как в этом режиме сильно возрастает влияние высокочастотных помех и наводок. На рис. 7.7 изображен операционный усилитель в режиме суммирования. Как нетрудно показать, при Zq (р) = Rq > С/вых(р)=-?о2 Свх г (Р) (7.62) При Zo(j)) = получаем суммирующий интегрирующий усилитель. В табл. 7.3 приведены типичные случаи использования операционного усилителя для получения различных динамических звеньев. В таблице использован мащинный оператор дифференцирования й% mi dt (7.63) При моделировании в натуральном масштабе времени х = t ж Р = р. > Рис. 7.7. Электроньая модель структурного типа имеет в своем составе несколько операционных усилителей, которые могут работать в режиме интегрирования, т. е. с конденсатором в цепи обратной связи. Число этих усилителей определяет наивысший порядок дифференциального уравнения, которое может быть исследовано на данной модели. Кроме того, имеется ряд вспомогательных усилителей, при помон],и которых можно осун],ествлять операции умножения на постоянный множитель (масштабирование), перемены знака (инвертирование) и суммирования. Исследуемые процессы в виде изменения мапшнных переменных (напряжений) могут наблюдаться и фиксироваться при помощи электронных и магнитоэлектрических осциллографов. Для приложения к электронной модели исследуемой системы задающих и возмущающих воздействий используются генераторы, которые могут воспроизводить требуемые функции времени, например линейную функцию, синусоиду, экспоненту, прямоугольную или треугольную волну и т. п., в виде соответствующего изменения электрического напряжения. Существуют также генераторы случайных а) величин, например генераторы шу- мового напряжения. Кроме того, электронная модель имеет ряд вспомогательных устройств, позволяющих после набора исследуемой задачи производить пуск и остановку решения дифференциальных уравнений, фиксацию решения в заданной точке, периодизацию решения и т. п. Набор задачи на электронной модели структурного типа может быть осуществлен двумя способами: 1) по дифференциальному уравнению, которым описывается исследуемая система, 2) по структурной схеме исследуемой системы. Рис. 7.8. Рассмотрим порядок набора задачи на простейшем примере. Начнем с первого способа. Пусть дана система регулирования, структурная схема которой представлена на рис. 7.8, а. Для этой схемы передаточная функция разомкнутой системы
 Н осциллограсру (7.64) Дифференциальное уравнение замкнутой системы, записанное в символической форме, в соответствии с (5.15) будет II + (Р)] v{t) = W (р) g (t), где у (t) - регулируемая величина, а g (t) - задающее воздействие. Таблица 7.3 Типовые динамические звенья электронных моделей Схема Передаточная функция 1> W{P)=-, TRC \-\-TP rlH=i, T\ = Rfi, T2, = R2C W{P)=-k Ti==RiC В рассматриваемом случае, учитывая (7.64), получим (йоР + iP + аР + з) it) = 3 (О (7.65) ао = ГхГз, 1 = + Га, 2 = 1 и 3 == fejun Перейдем к машинным переменным Y /ггу и G - Wge- Учитывая соотношения т = mtt ш р - mtP, получим из (7.65) дифференциальное уравнение для машинных переменных! {АР + АР + ЛР + 4з) Г (т) = (т), (7.66) -Тде Ао = ( 0 ti -а = ( 2. = з И == -
|