
|
|
|
Главная -> Логарифмическое определение устойчивости работающих объектов. Связанная система управления получается и при рассмотрении работы всего автопилота на самолете в целом. Пример электромеханической следящей системы показан на рис. 1.22. Принцип ее действия следующий. На входе вращением рукоятки задается произвольный закон для угла поворота во времени &о (t). Тот же самый закон угла поворота во времени должен быть автоматически воспроизведен на выходе системы, т. е. на управляемом объекте: &! = &о (t). Для этой цели угол поворота на выходе передается при помощи вала обратной связи на вход системы, где он вычитается из задаваемого угла Оо- Это вьшитание осуществляется при помощи механического дифференциала. Если угол на выходе не равен углу на входе Оо, то третий валик дифференциала повернется на разность этих углов х = &о - &! (рассогласование). Пропорциональное ей напряжение U подается через усилитель на приводной двигатель, который вращает выходной вал систеьш. Если же &! = Оо, то двигатель обесточен 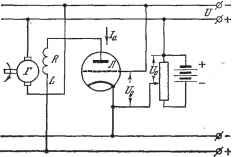 Рис. 1.21. рещив/г 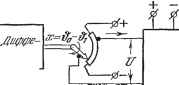 /пель  0раттгя связь {/правляе- Рис. 1.22. И вращения не будет. Следовательно, система все время работает на уничтожение рассогласования х = Оо - решая, таким образом, задачу воспроизведения на выходе произвольно задаваемой на входе величины &() (f). Такая система позволяет при незначительной мощности на входе управлять любыми мощными или Тяжелыми объектами (орудийными башнями и т. п.). Очень часто следящие системы применяются для дистанционного управления самыми разнообразными объектами, а также для телеуправления. Дистанционное управление трудно осуществить при механической обратной связи, показанной на рис. 1.22. В этом случае применяется реостатная обратная связь на постоянном токе (рис. 1.23) или сельсинная обратная связь на переменном токе (рис. 1.24), т. е. механический вал обратной связи ваменяется электрической передачей. При этом пульт управления (вход системы) и управляеьшй объект (выход) могут находиться на некотором расстоянии друг от друга. Здесь рассогласование получается непосредственно в виде электрической величины U = Uo - (рис. 1.23). Все три примера относятся к электромеханическим следяпим системам. Существуют также электрогидравлические, электропневматические и чисто гидравлические или пневматические следящие системы, в зависимости от вида применяемых в них усилительных устройств. Общий принцип действия во всех случаях остается тем же самым. Телеуправление применяется, когда пульт управления относится на боль-шие расстояния. Он может быть неподвижньш, а управляемый объект может 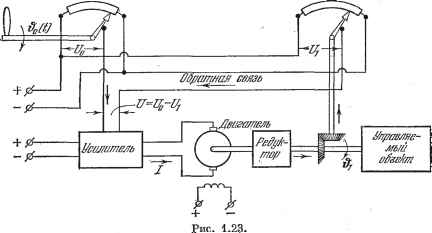
Рис. 1.24. 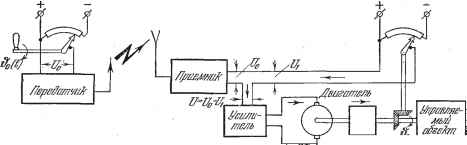 feffffMop Рис. 1.25. двигаться в пространстве. В этом случае между задатчиком величины Oq (f), помещаемым на пульте управления, и входом следящей системы вводится радиолиния или другая линия связи для передачи задаваемой величины Оо {J) в виде электрической величины С/о (f) (рис. 1.25). Входная и выходная величины следящей системы могут быть не только механические, как в примерах на рис. 1.22-1.25; они могут иметь любую физическую природу. В соответствии с этим конструкции тоже могут быть весьма разнообразными. Следящие системы, у которых входная и выходная величины представляют собой механические перемещения (вращения), иногда называются сервомеханизмами. По принципу следящей систеьш работают ьшогие системы дистанционного управления различными объектами, радиолокационные системы сопровождения самолетов, ьшогие счетно-решающие устройства (например, интегрирующее устройство, схема которого дана на рис. 1.26), усилители Tawoaempa-тр Рис. 1.26. с отрицательной обратной связью, многие точные измерительные системы, радиокомпас, радиодальномер и т. п. В настоящее время во многих областях техники существует необозримое -количество самых разнообразных систем автоматического управления, использующих принцип следящих систем. Он применяется почти везде, где нужно добиться высокой точности и надежности автоматического управления. § 1.4. Примеры дискретных и релейных автоматических систем Чтобы наглядно представить себе принцип работы простейшей импульсной системы регулирования, покажем, как ее можно получить из обыкновенных линейных систем регулирования непрерывного действия, т. е. из тех систем, которые рассматривались в предыдущих параграфах. daffamvuk \ 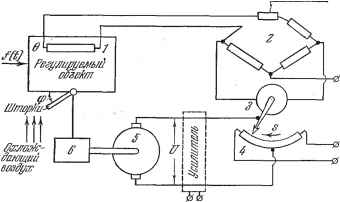 -0 + Рис. 1.27. Возьмем систему регулирования температуры непрерывного действия (рис. 1.27). Она работает согласно общей схеме (рис. 1.5). Необходимо поддерживать постоянную температуру объекта, охлаждаемого воздухом. Регулирующим органом являются нггорки, угловое положение которых ф определяет собой интенсивность поступления охлаждающего воздуха.
|