
|
|
|
Главная -> Логарифмическое определение устойчивости суммируется с напряжением щ. Эта сумма и представляет собой выходное напряжение и. Таким образом, для схемы, изображенной на рис. 4.22,je, где Т - коэффициент пропорциональности между скоростью изменения выходного напряжения датчика интегрирующего привода и напряжением Таблица 4.4 Временные характеристики интегрирующих звеньев Тип звена и передаточная функция Переходная функция Функция веса Идеальное W{p) = - w(t) = k-l{t) С замедлением W{p)=- P(i + Tp) 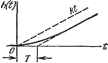 h{t) = h[t-T{i-e w{t) = k{\ - e )-l{f) Изодромное k{i+Tp) h(t) -A -V h{t) = (kt+ki).i{t) w(t) т{Р) = кЛЩ\ЬЩ на его входе. Коэффициент передачи идеального интегрирующего звена в этом , 1 случае равен л; = у. Временные характеристики звена представлены в табл. 4.4, а частотные - в табл. 4.5. Л. а. X. строится по выражению L(co) = 201gL!I±. Асимптотическая л. а. х. представляет собой две прямые: с отрицательным наклоном 20 дб1дек при (о <; и параллельную оси частот при и > y-j. Таблица 4.5 Частотные хараастеристаки йвтегрйруюьтк звеньев Тип звена и частотная передаточная функция Амплитудно-фазовая Амплитудная и фазовая Логарифмические Идеальное W{im) = Интегрирующее с замедпеЕием к /й)(1+/(оГ)  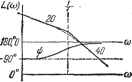 Изодромное wu.)=-X+k,jlj а(а>) >гг 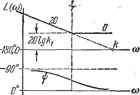 вательно, = В режиме, близком к хо- лостому ходу (сопротивление нагрузки ве- ~ - - лико), можно считать, что напряжение якоря равно э. д. с: и = е. Тогда и = /с . Приближенно в качестве идеального дифференцирующего звена может рассматриваться операционный усилитель в режиме дифференцирования <рис. 4.23, б). Временные характеристики приведены в табл. 4.6, а частотные - в табл. 4.7. 2. Дифферет1(ирующее звено с замедлением. Звено описывается уравнением Передаточная функция звена Звено условно можно представить в виде двух включенных последовательно звеньев - идеального дифференцирующего и апериодического первого порядка. На рис. 4.24 изображены примеры дифференцирующих звеньев с замедлением. Наиболее часто употребляются электрические цепи (рис. 4.24, а, б Из рассмотрения л. а. х. и л. ф. х. видно, что в области малых частот (меньших, чем сопрягающая частота) звено ведет себя как идеальное интегрирующее и тем точнее, чем меньше частота. В области больших частот (больших, чем сопрягающая частота) звено ведет себя как безынерционное с коэффициентом передачи к. Свойство звена вводить интегрирующее действие в области малых частот используется для улучшения качественных показателей систем автоматического регулирования (см. главу 9). § 4.7. Дифференцирующие звенья 1. Идеальное дифференцирующее звено. Звено описывается уравнением 2 = к-. (4.51) Передаточная функция звена . W (р) = кр. (40.52) Примеры идеальных дифференцирующих звеньев изображены на рис. 4.23. Единственным идеальным дифференцирующим звеном, которое точно описывается уравнением (4.51), является тахо- генератор постоянного тока (рис. 4.23, а), т - - если в качестве входной величины рассма- тривать угол поворота его ротора а, а в ка- честве выходной - э. д. с. якоря е. В тахо- -fi генераторе постоянного тока при неизменном потоке возбуждения э. д. с. в якоре пропорциональна скорости вращения: е = Ш. ffj Скорость вращения есть производная по f I I о da I -1-Ц уХ-а времени от угла поворота: У = -тт. Следо-
|