
|
|
|
Главная -> Логарифмическое определение устойчивости S< 9г
Объект ссиствтй реаулиробания величиной у и одним задаюпщм воздействием g. Во многих случаях задача исследования системы с ЦВМ может быть сведена к рассмотрению таких одиночных контуров (рис. 24.2). Принцип работы ЦВМ заключается в том, что возложенные на нее математические действия она производит в дискретные моменты времени = О, Г, гТ, ЗГ и т. д., где Т - период повторения ЦВМ. В интервалах ме?кду решениями на выходе ЦВМ сохраняется то решение, которое бьшо получено в начале рассматриваемого интервала. Поэтому непрерывная функция / (i) заменяется на выходе ЦВМ ступенчатообразной функцией / \пТ\ в соответствии с рис. 24.3. Эта функция и прикладывается к непрерывной части системы регулирования (рис. 24.2). В интервалах между решениями на выходе ЦВМ возможна также экстраполяция предыдущих решений по линейной, квадратичной и т. д. зависимостям. Сохранение предыдущего решения, указанное выше, соответствует использованию экстраполятора нулевого порядка. Этот случай и будет рассматривать в дальнейшем. Процесс превращения непрерывной фушщии в ступенчатую (рис. 24.3) соответствует квантованию по времени. Вследствие цифрового представления непрерывной величины в цифровой вычислительной машине имеет место также процесс квантования по уровню. Последнее объясняется тем, что цифровое представление допускает только вполне определенные фиксированные уровни сигналов, отличаюпщеся друг от друга наединицу младшего разряда. Рис. 24.1. Непреры5н(т\ часть 1 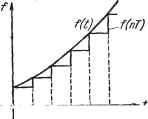 Рис. 24.2. 0\ TZT3T4T 5Т Рис. 24.3. Квантование по времени делает всю систему регулирования дискретной, а квантование по уровню - нелинейной. В дальнейшем изложении будем вначале предполагать, что влиянием квантования по уровню можно пренебречь. Это делает всю систему линейной и дает возможность использовать д.ля ее расчета аппарат, развитый для исследования импульсных систем (глава 15). Влияние квантования по уровню будет рассмотрено отдельно в § 24.4. Дискретные передаточные функции. Непрерывная часть системы, на входе которой действует ступенчатая функция / \пТ\, изображенная на рис. 24.3, носит название фильтра с фиксацией или фильтра с запоминанием. Для исследования подобных систем может использоваться аппарат г-преобразования и его модификации. Разница будет заключаться только в получении исходной дискретной передаточной функции разомкнутой системы W (z), т. е. дискретной передаточной функции фильтра с фиксацией. VF(z)=Z[5J, (24.3) где Z означает z-преобразование от изображения Лапласа, находящегося -В квадратных скобках. Пусть передаточная функция непрерывной части статической системы регулирования в разомкнутом состоянии может быть представлена в виде ~ (1+ЗД(1-Ьад...(1+ад Разложим ее на простые дроби: ai + p i=l j=l хде = , а iVi и i?i = NiTi - коэффициенты, определяемые в соогвет- -* i ствии с теоремой разложения (см. § 7.4). Переходная функция для последнего выражения представляет собой сумму экспонент i=l Из табл. 15.1 следует, что дискретная передаточная функция W {z) может быть представлена в виде г=1 г=1 1где di = ег. Для астатических систем первого порядка с передаточной функцией шепрерьшной части (J- Р(1+ЗД(1-ЬЗД...(1+г р) (-Ь) Дальнейшие исследования могут производиться в соответствии с изложенным выше для импульсных схем. Дискретный элемент, каким является ЦВМ, генерирует импульсы, длительность которых равна периоду повторения Т. В связи с этим можно воспользоваться формулой (15.139), если положить в ней т = 0: W (Z) = Z{feo(0} = o(z) (24.1) тде 0 it) - переходная функция непрерьшной части (рис. 24.2), а (z) является z-преобразованием переходной функции {t). Таким образом, отыскание передаточной функции разомкнутой дискретной системы с запоминанием сводится к отысканию переходнох! функции разомкнутой непрерьшной части, переходу от нее к z-преобразованию, что может быть сделано по таблицам, и умножению полученного результата на-. Формз-ла (24.1) может быть представлена также в другом виде. Переходная функция {t) является преобразованием Лапласа от передаточной -фушщии непрерывной части Wo ip), деленной на р: h{t)=L-[]. (24.2) Поэтому формулу (24.1) можно символически записать в виде W() = S-+2fe. (24.7) а для астатических систем с астатизмом второго порядка, имеющих передаточную функцию непрерьтной части - по выражению 2 (Z-1)2 где Zfi=.ff7o>0 - условная добротность по скорости, вычисляемая по формуле fi = Zro = (S гО, (24.10) а и iVj - коэффициенты разложения. Учет запаздывания. В контуре системы регулирования с ЦВМ может содержаться элемент, вносящий временное запаздывание (глава 14). Это запаздьшание может относиться как к непрерывной части, так и к самой ЦВМ. В последнем случае запаздывание определяется програйшой работы машины и не может превьппать периода повторения, т. е. О т Г. Учет запаздывания вне зависимости от того, относится ли оно к непре-рьшной части или к ЦВМ, осуществляется при определении дискретной передаточной фушщии разомкнутой системы (z). В этом случае z-преобразование от переходной функции непрерывной части должно осуществляться в соответствии с выражением (15.138): W(z)=Wi(z,z), (24.11) где g = Y - относительное запаздывание, е = 1 - g, VFj (z, е) - смещенное z-преобразование для переходной функции /г (t), определяемое по табл. 15.1. Исследование устойчивости и качества регулирования. После нахождения дискретной передаточной функции разомкнутой системы W (z) дальнейшее исследование производится в соответствии с главой 15. Для этой цели может быть найдена дискретная передаточная функция замкнутой системы (15.143): и дискретная передаточная функция по ошибке (15.144): ФЛ.)=1-ф()=т+ге- аналогичными рассужденияйш можно показать, что дискретная передаточная функция W (z) может вычисляться по выражению
|
||||||||||||||