
|
|
|
Главная -> Логарифмическое определение устойчивости Требуется найти уравнение преобразовательной части системы и = и (х), чтобы система была оптимальной по быстродействию при переходе ее из произвольного начального состояния в равновесное состояние (а; = 0, = 0j. При этом на управление и наложено ограничение м1<1. Обозначив Xj = ж, 2 = , приведем уравнение (23.19) к исходному виду (23.4): = u. (23.20) Функция Н согласно (23.14) и (23.4) здесь имеет вид Н = рух 4- фи. (23.21) Чтобы определить максимум Н по переменной и, надо найти g. Для этого воспользуемся уравнениями (23.16), которые в данном случае будут откуда фх == Су, 1)52 = С2 - Cyf. Принцип максимума (23.17), (23.18) с учетом выражения (23.21) и ограничения I I 1 дает и = sign Фа = sign (cg - Cyt), так как положительный максимум функции Н по переменной и будет согласно (23.21) при = -f-1, когда с - Cyt > О, и при и = -1, когда С2 - Cyt< 0. Поскольку линейная функция С2 - не более одного раза меняет знак, то в оптимальном процессе регулирования будет не более одного переключения с и = -{-1 ш& и = -1 или наоборот. Следовательно, оптимальная по быстродействию система будет релейной, но не обычной релейной, а с особьш специальным законом переключения реле по знаку вспомогательной функции Фг = 2 - it- Чтобы представить себе это нагляднее, изобразим процесс на фазовой плоскости. Исключив из уравнений (23.20) dt, получим при и = +1 дифференциальное уравнение dxy = Xg dxi, откуда фазовая траектория будет Рис. 23.2. (23.22) (23.23) Аналогично при li = - 1 получаем Это - параболы, симметричные относительно оси абсцисс Ху. Процесс должен заканчиваться в начале координат (ж = ж = О, dx \ Ж2 S = О) . Поэтому сначала изобразим фазовые траектории (параболы), вливающиеся в начало координат соответственно при и - -f-1 и при и = -1, как показано сплошньпии линиями на рис. 23.2. Нанесем теперь и все остальные параболы с различными значениями с в формулах (23.22) и (23.23) до точек их вливания в изображенные ранее две ветви параболы, идущие к началу координат. Это и сделано на рис. 23.3. Как видим, из произвольной точки Mq (жщ! го) процесс идет по некоторой параболе MJ) при управляющем сигнале li = -1 (в другой области было бы и = 4-1)- В точке D происходит переключение реле на сигнал и = после чего процесс идет по параболе /)С и заканчивается в точке О за конечное время, которое согласно принципу максимума является минимальным из всех возможных для перехода данной системы из состояния Мо (жю, Жао) в равновесное состояние О (О, 0). Точка переключения реле D может находиться в любом месте кривой АОВ. Последняя называется поэтому линией переключения На ней лежат заключительные отрезки фазовых траекторий, приходящие в начало координат. Итак, искомое уравнение преобразовательной части системы (оптимальной по быстродействию) будет Ч-1 ниже линии АОВ и на дуге АО, (23.24) 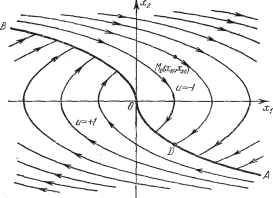 Рис. 23.3. I --1 выше линии АОВ и на дуге ОВ, причем ж = ж отсчитывается на оси абсцисс. Замечая, что = из формул (23.22), (23.23) и рис. 23.2 находим уравнение линии переключения: (§)=~iSnx)2Yx, (23.25) и следовательно, уравнение преобразовательной части системы будет и (х) = dx It < ( dt ) dx I при-= ( и при ax It (23.26) Ж И для Итак, в системе должны быть либо два измерителя либо один измеритель ж и дифференцирующее устройство. Должно формироваться (автоматически вьгаисляться) переключающее значение согласно формуле (23.25), и на основе сравнения фактического текущего значения со значением (-г) , зависяпщм от текущего ж, должно производиться вклю- \dt I п чение и переключение реле в соответствии с уравнением (23.26). Это является специальным нелинейньш законом регулирования для линейного объекта (23.19), приводящим к оптимальной по быстродействию системе. Таков результат решения простейшей задачи оптимизации. Пример 2. Пусть задана система £ + ж=и. (23.27) Требуется найти такое уравнение преобразовательной части системы и - и (ж), чтобы система была оптимальной по быстродействию, т. е. в кратчайшее время приходила бы в равновесное состояние ж = О, = 0. При этом задана область допустимых значений управления Перепишем заданное уравнение (23.27) в виде 1 = - §=-1 + - (23-28) Функция Н согласно (23.14) и (23.4) здесь будет Н = фжа -f- ф2 (-Ж1 -f- и). (23.29) Для вспомогательных переменных из (23.16) и (23.29) получаем уравнения откуда г)2 = Су sin (t - Cg)- Принцип максимума (23.17) и (23.18), с учетом выражения (23.29) и условия I W i 1, дает и - sign ijjg = sign [sin (if - Cg)], (23.30) так как согласно (23.29) положительный максимум величины И по переменной и будет при и = если фа > О, и при и = -1, если фа < 0. При и = 4-1 уравнения системы (23.28) будут -2, .--Ж14-1. Решения их имеют вид ж = 1 - а cos (t -f Р), Жа = G sin (if 4- p), где G О, 0 P < 2л;. Следовательно, фазовые траектории при и = +1 будут окружностями (ху - 1)2 -1- ж = а\ (23.31) Ана-погично при и = -1 {ху + 1)2 -1- = (23.32) Очевидно, что вливающиеся в начало координат фазовые траектории будут иметь вид полуокружностей (23.31) и (23.32) с радиусами а = i (рис. 23.4). Это будут концевые участки траекторий. В них будут входить в произвольных точках By и Dy предыдущие участки фазовых траекторий снизу (где и = 4-1) в виде полуокруншостей с центром, смещенньш на единицу вправо (DzBy), а сверху (где и = -1) - с центром, смещенньш на единицу влево [BDy). Это будут именно полуокружности, так как знак и меняется согласно (23.30) через t = п. Следовательно, линия переключения составится из единичных полуокружностей, как показано на рис. 23.4 в виде ломаной кривой ByODyDDs-
|
||||||||||||||