
|
|
|
Главная -> Логарифмическое определение устойчивости I 22.2] ПРОСТЕЙШИЕ СЛУЧАЙНЫЕ ПРОЦЕССЫ В НЕЛИНЕЙНЫХ СИСТЕМАХ 673 Далее получаем выражения типа (22.13), где 2 [/2п Эти функции для случая т = 0,5 изображены на рис. 22.5, виг. 4. Характеристика типа насыщения (рис. 22.6, а). По формуле (22.4) с учетом обозначений (22.12) и (22.14) находим 1 fi±iФ +fizdФ ( ,)(,-и! что показано в зависимости от Ху при разных Оу на рис. 22.6, б. По формулам же (22.9) и (22.11) находим выражение (22.13), где <==[1-(£.у + {1-2щи)[ф{щ) + Ф{щ)- + ф<) = [ф( ,) + ф(г,2)], что изображено на рис. 22.6, виг. § 22.2. Простейшие случайные процессы в нелинейных системах В данном параграфе рассматриваются такие задачи, в которых регу-лярнай составляющая процесса х (математическое ожидание) постоянна или медленно меняется во времени по сравнению с составляющими основных частот спектра случайной составляющей хР. Обратимся к нелинейным системам, динамика которых описывается уравнениями вида Q{p)x+ Rip) F{x, рх) = Sip)f (t), (22.15) где / (t) - внешнее воздействие, представляющее собой случайный процесс, причем f{t) = J+r{t). (22.16) Здесь / - заданное математическое ожидание (регулярная составляющая), а f - центрированная случайная составляющая. Пусть параметры системы таковы, что автоколебания отсутствуют и система устойчива относительно равновесного состояния. Применив статистическую линеаризацию (22.3) и подставив полученное выражение в заданное уравнение (22.15), разобьем последнее на два уравнения: Q{p)lc-\-R{p)F==S{p)i: (22.17) [<? (Р) + R (Р) О (Р) Г, (22.18) соответственно для регулярных (математических ожиданий) и случайных (центрированных) составляющих. При этом F{x, ст), д (ж, ст) определяются для каждой заданной нелинейности, как указано в § 22.1. Рассмотрим в общем виде две различные задачи. Sf (to) da, (22.21) где в выражении S (ж, а,) (22.22) необходимо X заменить найденной выше функцией (22.20). Тогда в уравнении (22.21) останется одна неизвестная величина а. Учитывая формулы (11.91) и (11.92), уравнение (22.21) можно записать в виде ol = kIr,{x, Gf), (22.23) где h - постоянный множитель, выносимый за знак интеграла (формулы для вычисления интеграла приведены в приложении 2). Таким образом, путем решения уравнения (22.23) с подстановкой (22.20) будет найдено среднеквадратичное отклонение о, а затем по формуле(22.20) будет вычислено и математическое ожидание х, т. е. полностью определится искомое приближенное решение ) уравнения (22.15): ж = жЧ-ж . (22.24) Это решение справедливо для случая установившегося режима при стационарном случайном процессе. Однако зависимость ж (ст) далеко не всегда можно выразить из уравнения (22.19) в явном виде ввиду сложности выражения F (ж, a). Поэтому в большинстве случаев придется решать совместно два уравнения, (22.19) и (22.23), либо численно, путем последовательных приближений, либо графически. Можно применять, например, следующий графический прием. Представим уравнение (22.19) в виде двух уравнений: П=ж, 5 (0) -г R (0) ,~ , (22.25) Первое из них дает прямую 1 (рис. 22.7, а), а второе - серию кривых 2 для различных постоянных значений a. Перенеся все точки пересечения этих кривых с прямой 1 на плоскость координат ж, (рис. 22.7, б), получим зависимость Ux (ж) в виде кривой 3, так как каждой точке пересечения на верхней! графике соответствовало определенное значение а. После этого 1) Во всех задачах здесь и далее будем искать приближенное решение только для переменной х, стоящей под знаком нелинейности. Когда оно найдено, всегда можно через соответствующие передаточные функции найти приближенное решение и для других переменных системы. Первая задача. Если имеет место стационарный процесс, то величины /, X, Ох являются постоянными (имеет место некоторый установившийся режим) и уравнение (22.17) принимает алгебраический вид: Q{0)x + H (0) F {х, и) = S (0) /. (22.19) Здесь фигурируют две неизвестные: х и о х- Поэтому в принципе отсюда можно лишь выразить величину х как функцию ct- ж(ст). (22.20) Далее по линейной теории случайных процессов, описанной в главе 11, производится исследование уравнения (22.18). В этом уравнении величина /я задана спектральной плотностью Sf (ш) или корреляционной функцией Tf (т). Линейная теория дает S (/ш) построим (рис. 22.7, б) еще одну зависимость (ж) в виде кривой 4 по формуле (22.23), подставляя в правую часть этой формулы значения о, взятые для каждого ж из кривой 3. Очевидно, что координаты точки пересечения С кривых 3 ж 4 представляют собой искомый результат совместного решения уравнений (22.19) и (22.23). Вторая задача. Перейдем теперь к решению другой задачи, когда исследуется неустановившийся процесс. Часто в автоматических системах управления разложению искомого решения (22.24) на и afi соответствует разложение его на полезный регулярный сигнал ж и случайную помеху х. Когда полезный сигнал управления ж изменяется во времени, процесс уже не будет стационарным. Однако, если помехи (флуктуации) характеризуются спектром значительно более высоких частот, чем полезный сигнал, можно считать последний медленно меняюш,им-ся. Тогда можно исследовать случайный процесс в первом приближении как стационарный, применяя формулу (22.23). Но при этом для определения регулярной составляющей ж нельзя пользоваться алгебраическим уравнением (22.19), а надо обращаться к дифференциальному уравнению (22.17). В этом случае описанное выше графическое решение не годится и следует поступать иначе. Сначала надо из уравнения (22.23) определить зависимость (ж). Для этого по аналогии с графическим решением (21.25) разобьем уравнение [(22.23) на два 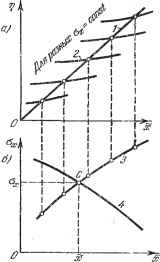 Рис. 22.7. 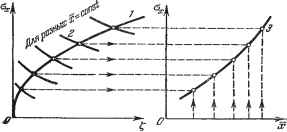 уравнения: (22.26) Рис. 22.8. й/ (ж, ст)=£. Первое из них дает параболу Т (рис. 22.8), а второе - серию кривых 2 при разных постоянных значениях ж. Перенеся ординаты их точек пересечения на плоскость ж, и отложив для каждой из них соответствуюпще кривым 2 абсциссы ж, получим в виде кривой 3 (рис. 22.8) искомую зависимость Ох (ж). Подставив полученную зависимость (ж) в вычисленное для заданной нелинейности согласно § 22.1 выражение F (ж, а,), (22.27) исключим из него величину a- и получим функцию от одной переменной = Ф(ж), (22.28) которую, как и в главе 19 и § 21.2, можно назвать функцией смещения ), 1) По аналогии с введенными ранее функциями смещения это будет сглаженная при помощи случайных флуктуации нелинейная характеристика для медленно меняющейся составляющей процесса.
|