
|
|
|
Главная -> Логарифмическое определение устойчивости В ЭТОМ случае отрицательное влияние постоянной времени т (а) ском-пенсируется введением дополнительного демпфирования с помощью слагаемого 2 I с I РЧ>- Аналогичными приемами можно стабилизировать запас по фазе, показатель колебательности и т. п., т. е. исключить плавание этих характеристик из-за нелинейности при изменении величины сигнала.  i20lg\W(Joj,(£}\  Рис. 20.26. Рис. 20.27. Обеспечение повышенной точности внешнего контура. Поставим задачу выбора структуры и параметров блока Wi (рис. 20.23), обеспечивающего устойчивость внешнего контура и повышенную точность стабилизации величины Z с учетом ранее выбранной структуры и параметров первого и второго контуров. Передаточная функция промежуточного контура по отношению к управляющему воздействию будет W (p, a) Если рассматривать наиболее характерные частоты, влияющие на работу внешнего контура, т. е. о < ©сг то получим :<1. Тогда W (р. О) Oz or) (20.84) В случае линейной системы блок И , имеет структуру (20.74), а блок Wz внешнего контура должен иметь следующую структуру: (р) = т,{1 + Т,р), причем по рекомендации линейной теории Tz = nTa, mi = kTz VTzTa (20.85) (20.86) где n - некоторое число, выбор которого зависит от требований к колебательности и запасу по фазе внешнего контура. Зависимость установившейся ошибки z-t от возмущений /г и fy опре-.деляется формулой (20.87) Для уменьшения установившейся ошибки ZyT при ранее выбранном ку необходимо увеличивать т-у. Однако предельное значение ограничено требованием обеспечения устойчивости системы. Для уменьшения установившейся ошибки можно рекомендовать нелинейный закон регулирования, на- пример, в виде = 2.1 I Z Г sign Z 4- mz. (20.88) Тогда W,(p,z)= = miz)ll+Tiz)p], (20.89) m{z)=ml\z\-, Т {z) = m(z) 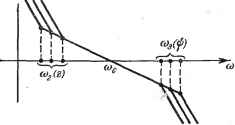 Передаточная функция разомкнутого внешнего контура в (Р, Z, If) - 2 Рис. 20.28. (20.90) На рис. 20.28 представлены логарифмические алшлитуднхе частотные характеристики, соответствующие этой передаточной функции. Характерно, что частота среза (о Ti данном случае не зависит от величины сигнала z. Характеристика 1 соответствует малым сигналам, а. S - большим сигналам. Величина установившейся ошибки в данной системе будет bc. = [kih + h]- (20.91) Расчеты и моделирование показывают, что таким путем можно в несколько раз повысить установившуюся точность по сравнению с линейным законом регулирования при сохранении устойчивости и требуемых запасов по фазе я по амплитуде. ГЛАВА 21 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ § 21.1. Симметричные одночастотные вынужденные колебания Проблема определения вынунеденных колебаний нелинейных систем вообще является весьма сложной и многообразной. Поскольку принцип наложения решений (суперпозиция) здесь несправедлив, то, вообще говоря, нельзя складывать частные решения при различных внешних воздействиях, найденных по отдельности, а также складывать свободные и вынужденные колебания. Особое нелинейное слонение решений возможно в случае, если решения разделяются по степени медленности протекания их во времени (т. е. по значению возможных частот колебаний), аналогично тому, как это делалось в главе 19. При этом каждое из складываемых решений существенно зависело от другого, а именно амплитуда автоколебаний существенно зависела от величины смещения, характеризующей медленно протекающие процессы. Такого же рода разделение решений для вынужденных колебаний будет рассмотрено нинсе, где появится возможность рассмотрения нелинейных двухчастотных колебаний с большой разностью частот. Не касаясь сложных форм вынужденных колебаний нелинейных систем (хотя их исследование также имеет большое практическое значение), ограничимся в данном параграфе определением одночастотных вынужденных колебаний, когда колебания системы происходят с частотой внешнего периодического воздействия. Форма колебаний, как и прежде, на основании свойства фильтра будет считаться близкой к синусоидальной для переменной х, стоящей под знаком нелинейной функции. При рассмотрении вьшужденных колебаний во многих случаях возникают ограничения, накладываемые на амплитуду и частоту внешнего периодического воздействия (зависящие также и от параметров системы) и обусловливающие существование одно-частотных вынужденных колебаний в нелинейной системе. Будем их кратко называть условиями захватывания (в указанном широком смысле). Особое значение эти условия приобретают для автоколебательных систем при частотах, близких к частоте автоколебаний и выше. Итак, пусть имеется некоторая нелинейная автоматическая система, в любом месте которой приложено внешнее синусоидальное воздействие f{t)=B sin (21.1) Пусть уравнение динамики системы приведено к виду Q (р) X + R [р) F (х, рх) = S{p)f (t). (21.2) Вьшолнение условий фильтра (§ 18.2), а также выводимых ниже условий захватывания (где это необходимо) позволяет в первом приближении искать решение для установившихся вынужденных колебаний системы в синусоидальной форме X = йз sin ((Ое! + ф), (21.3)
|