
|
|
|
Главная -> Логарифмическое определение устойчивости В принципе решение не меняется. Изложенный метод решения задачи отличается тем, что он одинаково пригоден к различхшм системам, описываемым уравнениями любого порядка, и не связан с построением годографов на комплексной плоскости. § 20.3. Система с нелинейным корректирующим устройством На примере конкретной следящей системы (рис. 20.17) рассмотрим некоторые особенности введения специальных нелинейных корректирующих устройств, использование которых приводит к тому, что переходный процесс 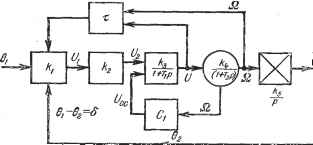 Рис. 20.17. в системе имеет такой вид, как будто инерционность двигателя во время переходного процесса существенно уменьшается [134]. На рис. 20.18 тонкой линией показано, что при синусоидальных колебаниях вследствие инерционности двигателя ошибка реальной схтетемы бр отстает от ошибки при идеальном двигателе бц на угол ф = arctg ©Г, где со - частота колебаний, Т - постоянная времени двигателя. Введение нелинейных динамических корректирующих сигналов в данном случае производится таким образом, чтобы деформировать вид кривой ошибки бр, как показано штриховкой на рис. 20.18. Для отыскания численных соотношений, определяющих зависимость между интервалом введения динамического корректирующего сигнала и эквивалентными параметрами двигателя, разложим заштрихованную кривую (рис. 20,18) в ряд Фурье и сравним с кривой ошибки б при безынерционном двигателе. Ограничиваясь основной гармоникой колебаний, получим (20.52) 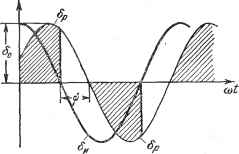 Рис. 20.18. б = б sin coi -\- 62 cos (iit. бо I sin (©i-я))) sin чЛ d(ot, 11 62 = бо j sin {at ~ я))) cos at dat Ф Заметим, что амплитуда ошибки бц связана с амплитудой управляющего напряжения а соотношением бц == cos ф. При этом выражения для коэффициентов гармонической линеаризации примут вид g = [cos ф (я - ф) + sin ф], =-( -ф). (20.54) Поэтому гармонически линеаризованное уравнение двигателя с указанной нелинейной коррекцией будет / \ I ? (.0-1 w) (20.55) где О.-щ.и обозначенЪх на рис. 20.17. Оно позволяет совместно с уравнениями остальных звеньев системы проводить анализ системы. Однако использование уравнения (20.55) технически не всегда бывает удобно. Недостатком формы записи его является то, что двигатель, по существу, является инерционньш звеном, в то время как уравнение его получилось в форме уравнения звена с введением производной, причем д < 0. Для получения передаточной функции двигателя обычного вида необходимо сделать некоторые специальные преобразования. Будем искать ее в виде с неизвестными пока к* и Г*. Потребуем, чтобы (20.56) и (20.55) были эквивалентны друг другу. Уравнение (20.56) запишем в виде (20.57) и подставим в него значения -т- и Ql из (20.55): q{a, со) dV . д (а, (О) dU + q{a,a)U+-k*U. (20.58) Для случая исследования автоколебаний и устойчивости системы выражение для напряжения U принимается в виде и - а sin &t. Подставив это в уравнение (20.58) и выделив члены с синусами и косинусами, получим систему уравнений T*q {а, (д) (д + q {а, со) = О, - T*q (а, а) & + q {а, ©) - /с* = О, откуда находим -д>.со) J,*qa)+ ti * . (20.59) cog (а, со) ч \ / t g со) Таким образом, передаточная функция двигателя с нелинейной коррекцией имеет вид т (а, (О) qa,a)~q{a,a) + -Mp]U. (20.61) Передаточную функцию двигателя с нелинейной коррекцией, как и прежде, ищем в виде (20.56) или T*~ + Q = k*U. Подставим сюда значения и Й из (20.61). Получим q (а. О)) -I q {а, со)] рС7+ + q{a, со)---g(a, со)] U+-pU=k*U. (20.62) Затем, учитывая форму решения (20.7), (20.8), запишем выражения pU = а ( sin ф -Ь со cos я))), pU = а ( - со) sin \р + 2асо cos ф и подставим их в (20.62). Разделяя там члены с синусами и косинусами, получим систему уравнений Г* [tog (а, со) -f tq (а, со)] + q (а, со) = О, Т* Щ {а, со) - tog (а, со)] -Ь g {а, &) - к* = 0. Отсюда находим выражения для эквивалентного коэффициента усиления и постоянной времени: [д (а, (й)]2-- g (а, со) д {а, со) к* = q (а, СО) -f-<-, (20.63) д(а, т)+-д(а, со) п* - gK to) д{а, (u)4.-i-g(o, со) (20.64) Они отличаются от выражений (20.59), выведенных для случая исследования автоколебаний и устойчивости, наличием членов с tja, характеризующих переходный процесс. Поскольку в полученные формулы величина показателя затухания входит только в составе дроби g/co, причем практически при исследовании колебательных переходных процессов часто со ] , то во многих случаях и для переходных процессов можно использовать более простые формулы (20.59). Используя выражения, полученные для коэффициентов гармонической линеаризации (20.54), и выражения для эквивалентных параметров двигателя (20.63) и (20.64), MOHfflo найти общее выражение для эквивалентной постоянной времени двигателя при использовании данного вида нелинейных корректирующих сигналов: Заметим, что в данном случае д (а) < О и эквивалентная постоянная времени звена Г*, как это и должно быть, положительна. Из выражения (20.59) видно, что для уменьшения постоянной времени двигателя нужно уменьшить величину \ q (. Найдем передаточную функцию двигателя с указанной нелинейной коррекцией для исследования переходного процесса. Вместо (20.55) получим
|